My works of art
Some of the things I've worked on over the past few years!
(Click on a project to learn more or to see all images)
{kind=link}
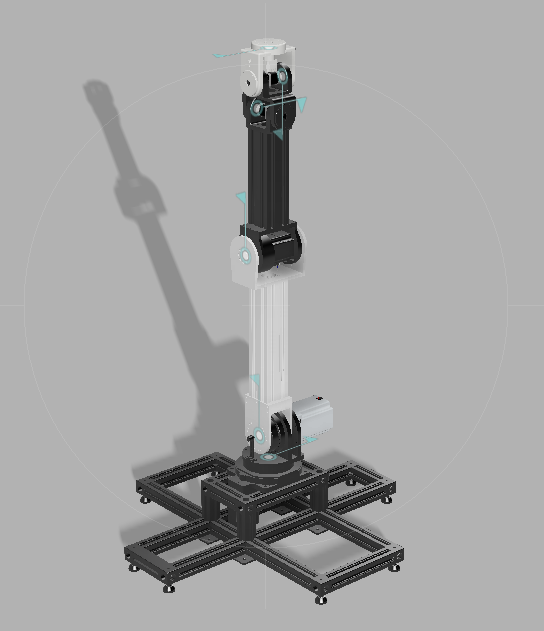
B.O.R.A.T CAD model
B.O.R.A.T started out as a simple CAD model. Over a few weeks, it went thought a lot of iterations and test 3D prints to get to a final design.

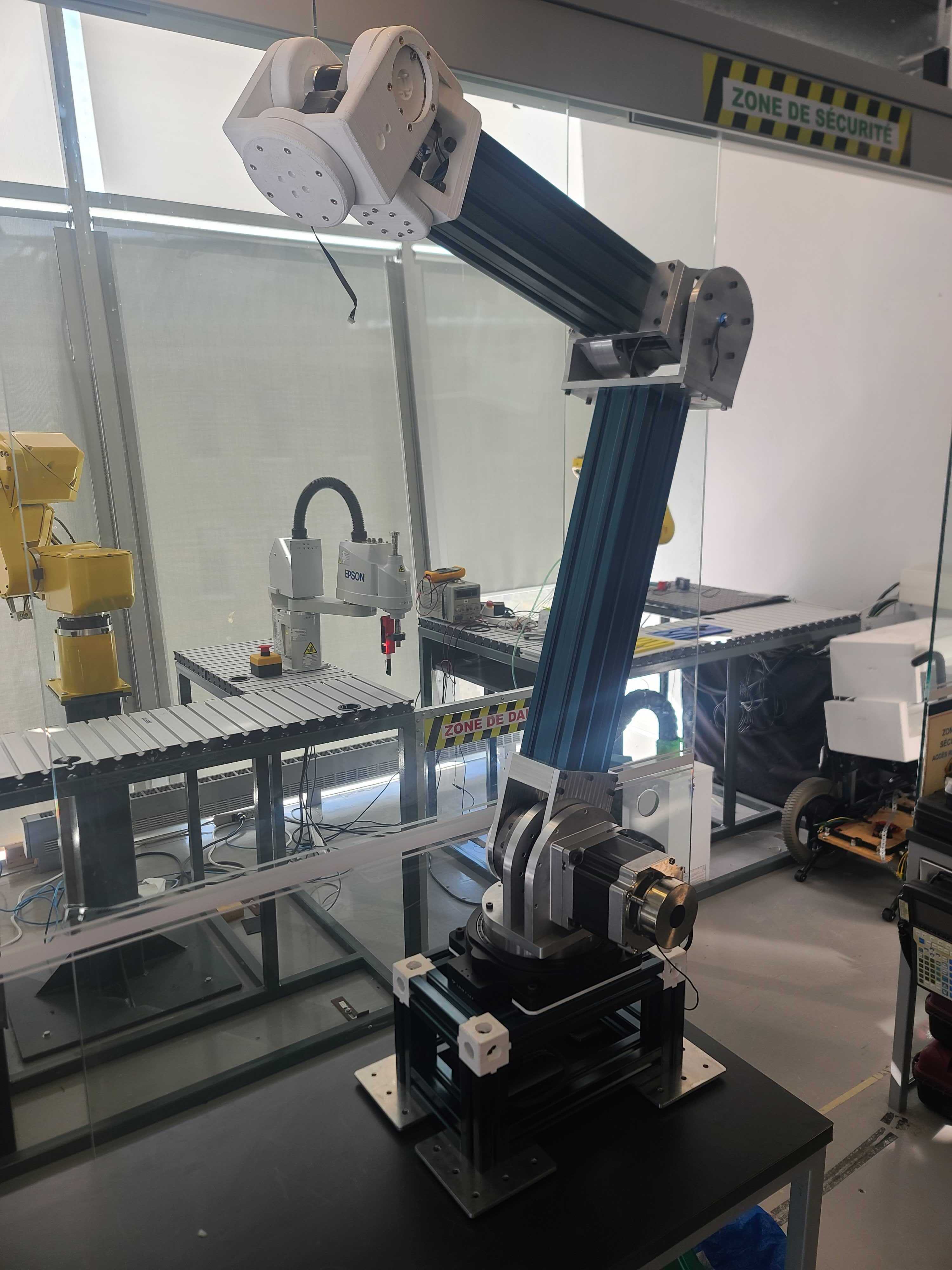
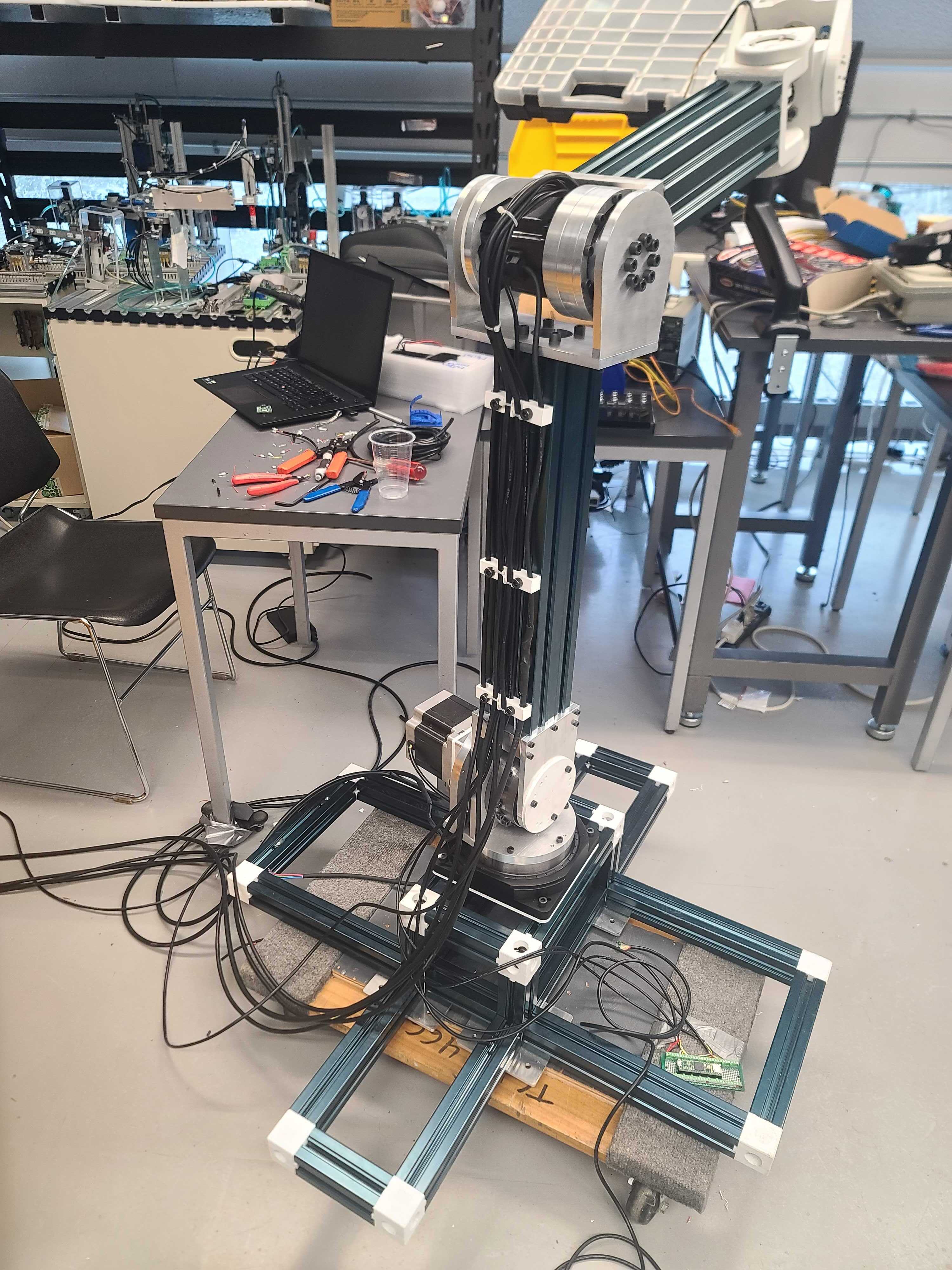
BORAT - Robot Arm
This is B.O.R.A.T, short for Badass Open-source Robot Arm Titan. It's a robot arm I made all by myself for my final school project. It's a 6 DOF robot arm that has a reach of 1600mm and can lift up to 25kg (Altough I don't recommend that!) It is made entirely in aluminium and PC plastic. It uses on average 600w with peaks of 850w. The robot is controlled by ROS where MoveIT is used to compute the IK solution and a custom driver is used to communicate with the control box electronics.
{kind=link}
B.O.R.A.T machined aluminium parts
After I was satisfied with my design and with the test 3D prints, I placed an order for custom machined parts in China. They arrived a few weeks later and I started to assemble the robot!
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
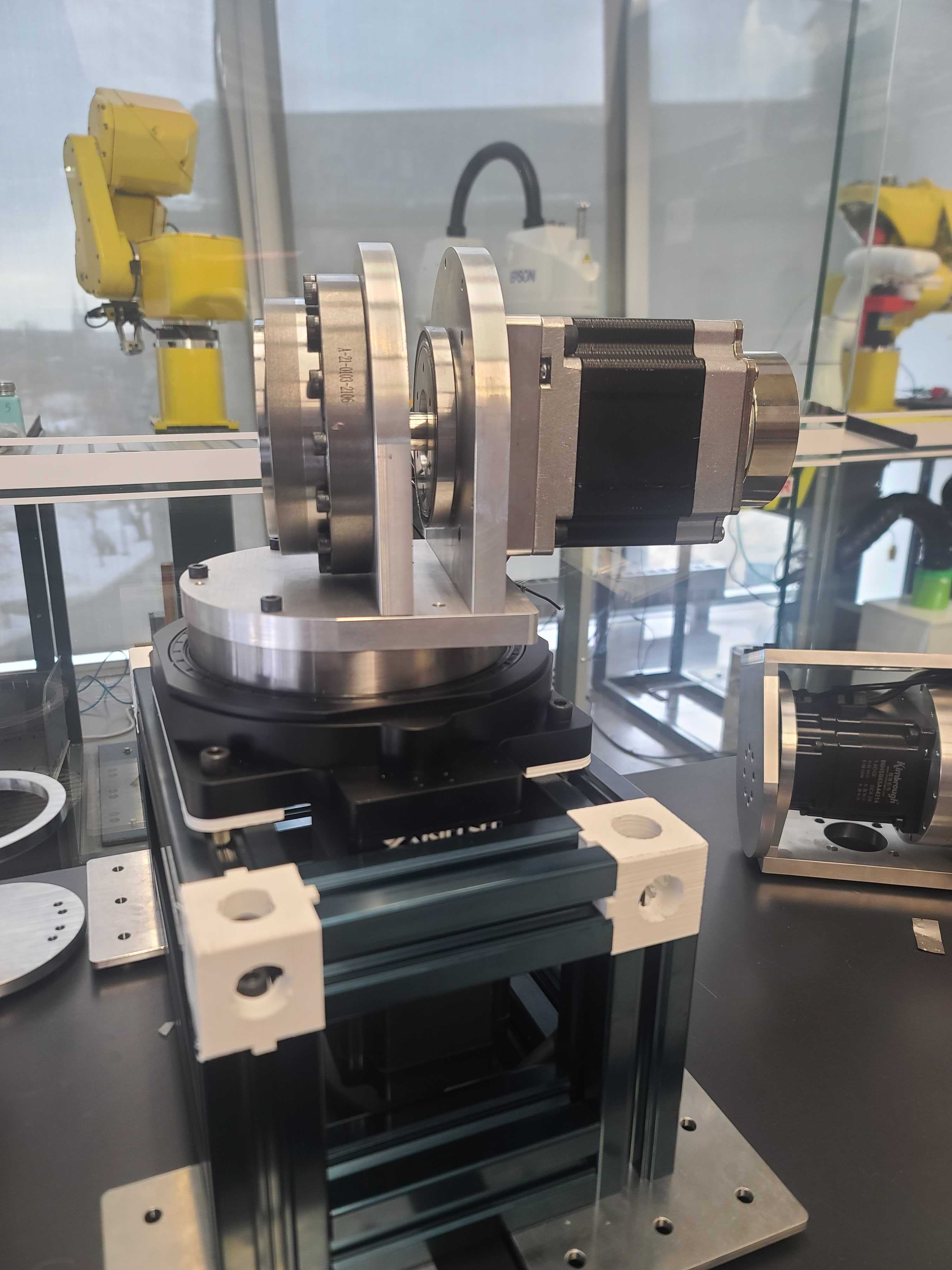
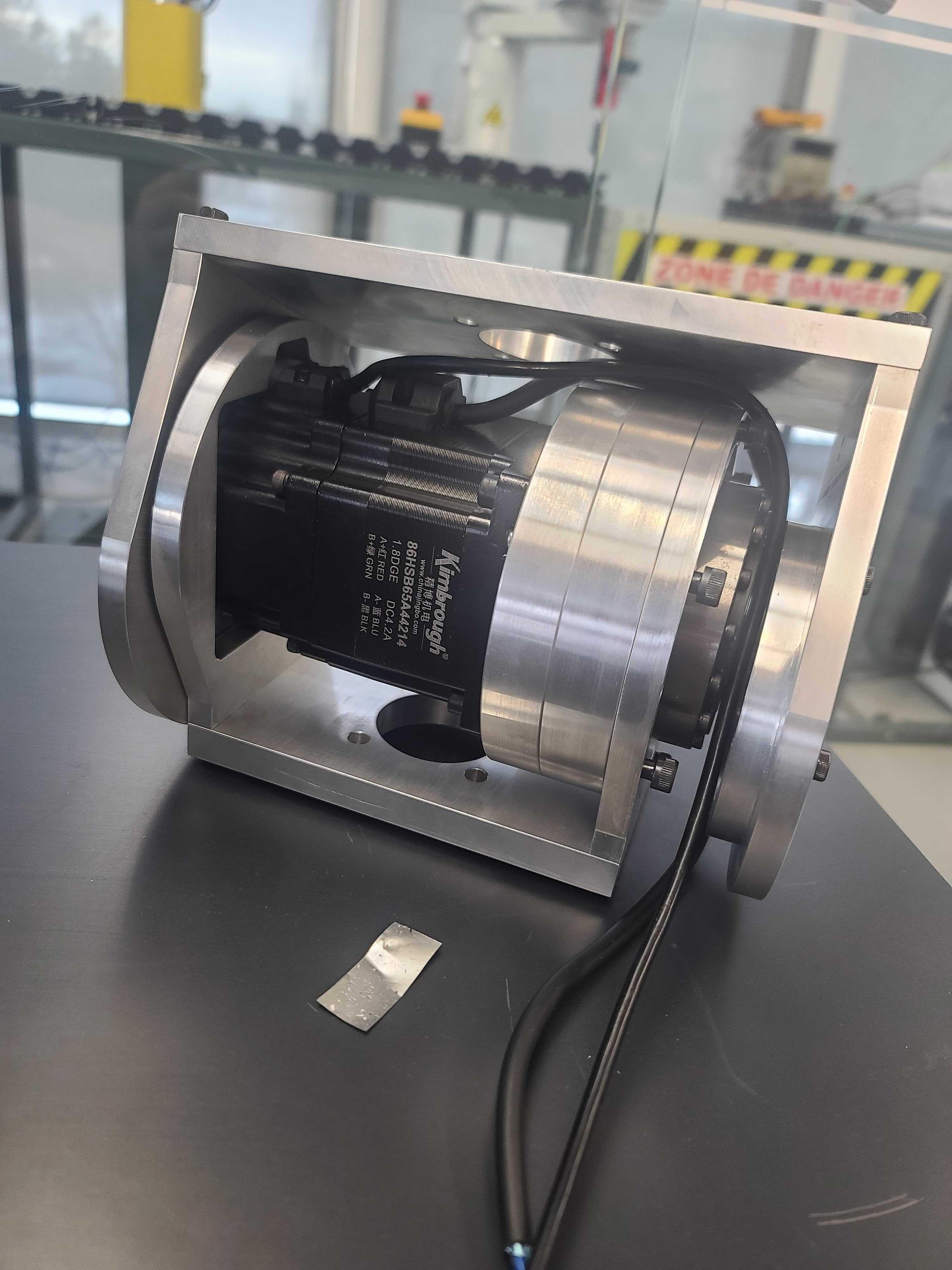
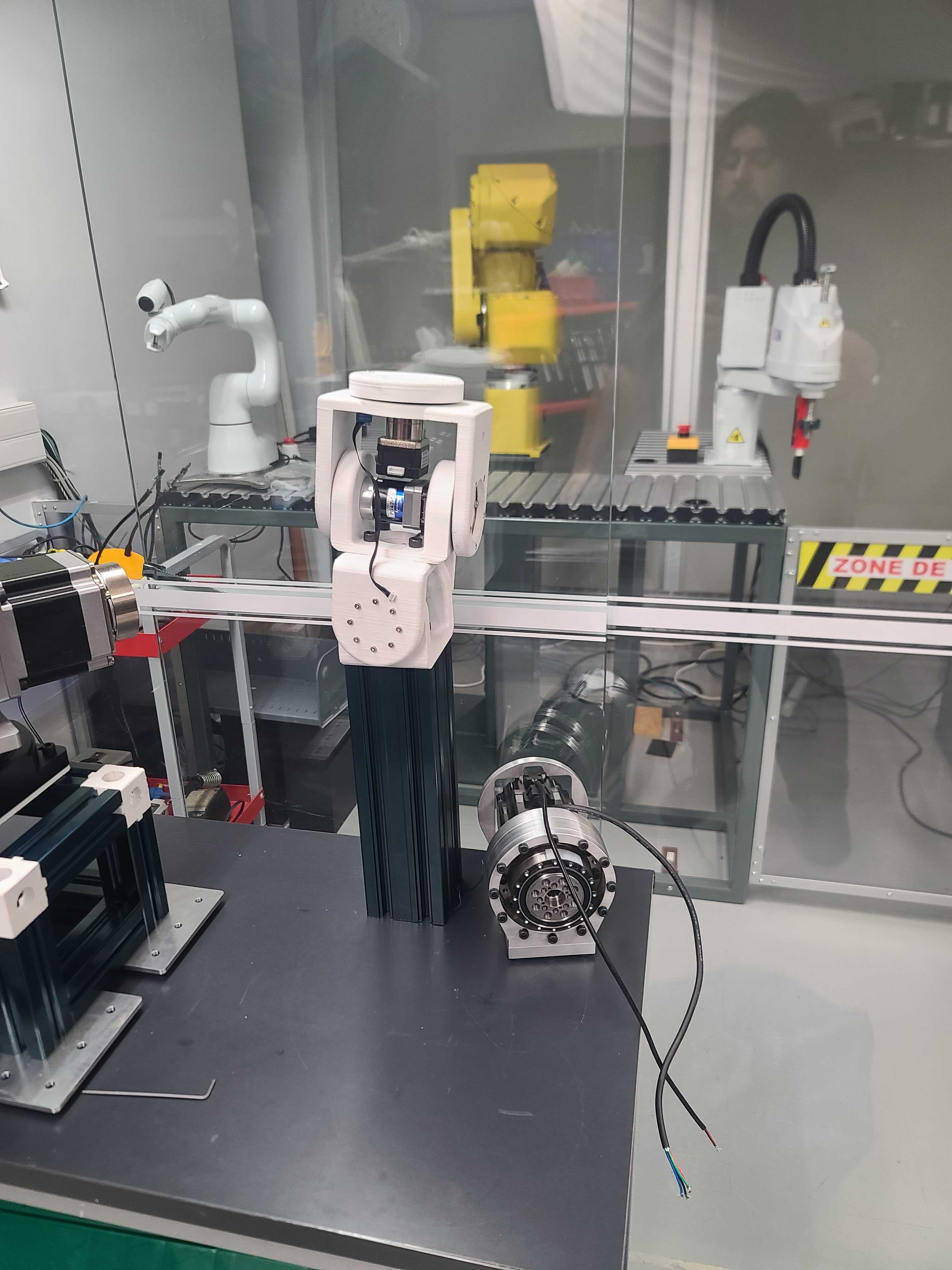
J3 Gearbox - Motor
This is J3's motor - gearbox combination. The gearbox itself is a strain wave gear.
{kind=link}
{kind=link}
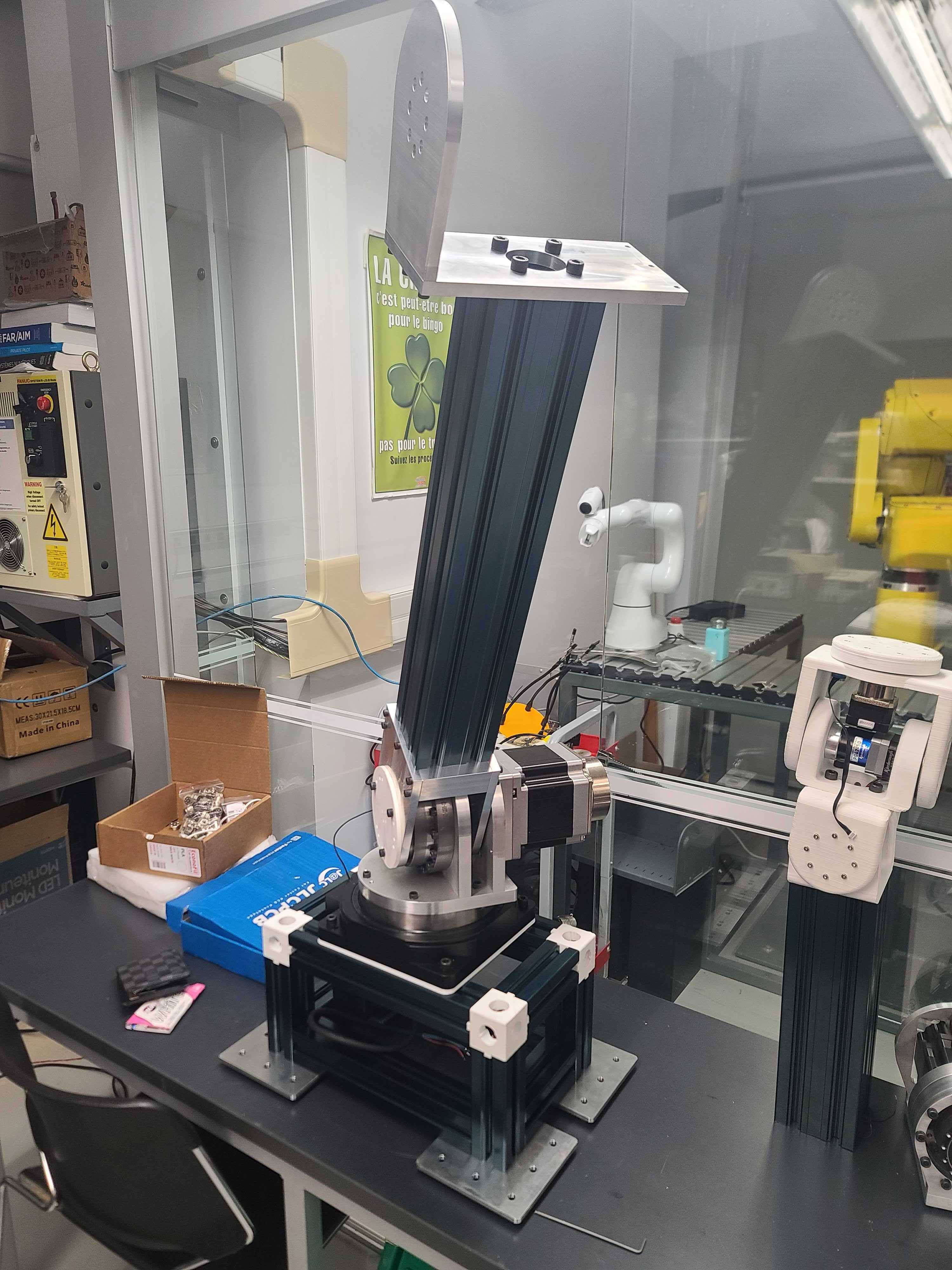
Fully Assembled!
This is the first picture I took of the robot arm fully assembled! Now that the robot was assembled, it was time to test each joints. Click Here to see the J1 test. Click Here for the J2 test. Click Here for the J3 test. Click Here for the J4 test. And click Here for the J1 test.
{kind=link}
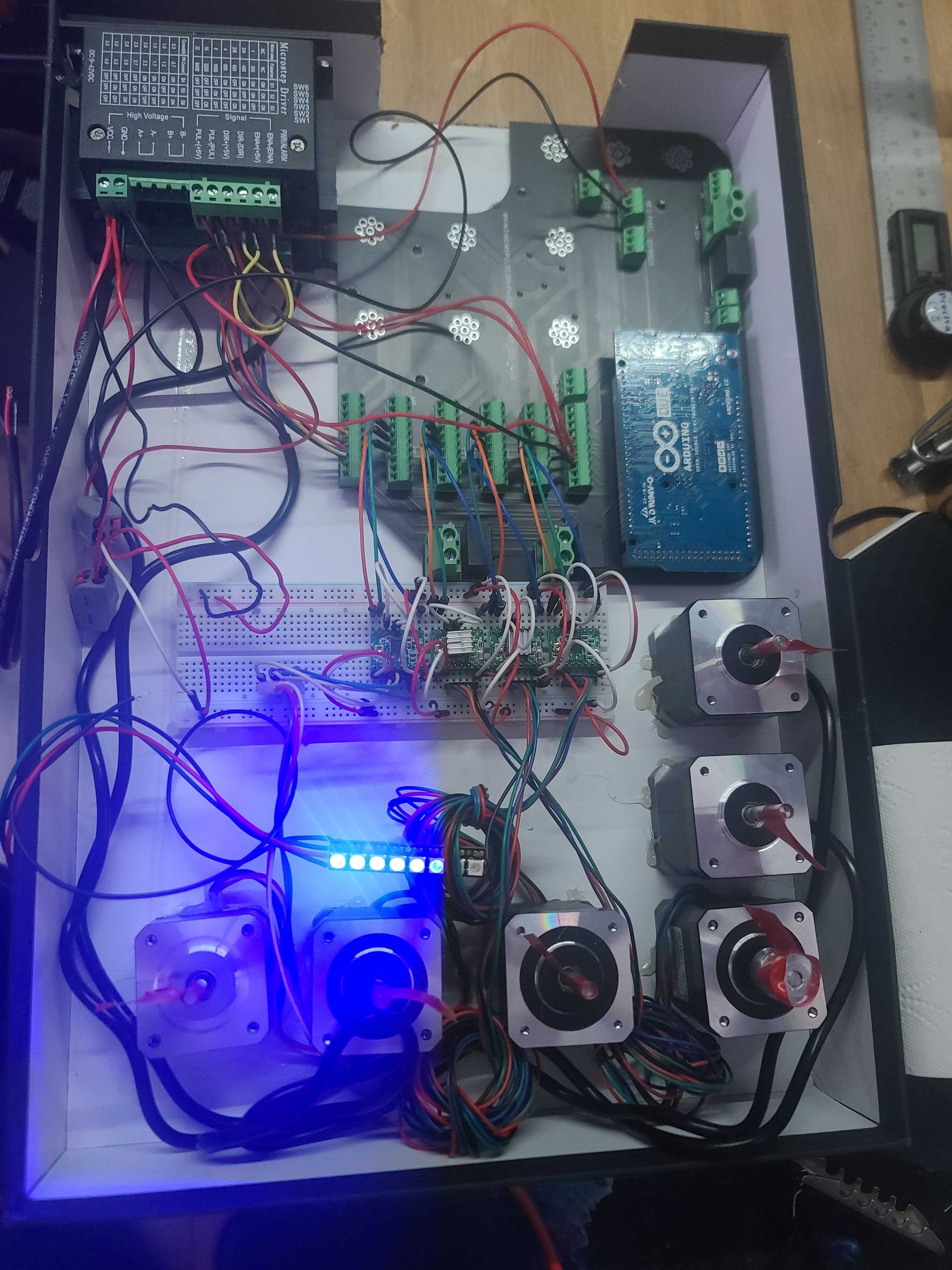
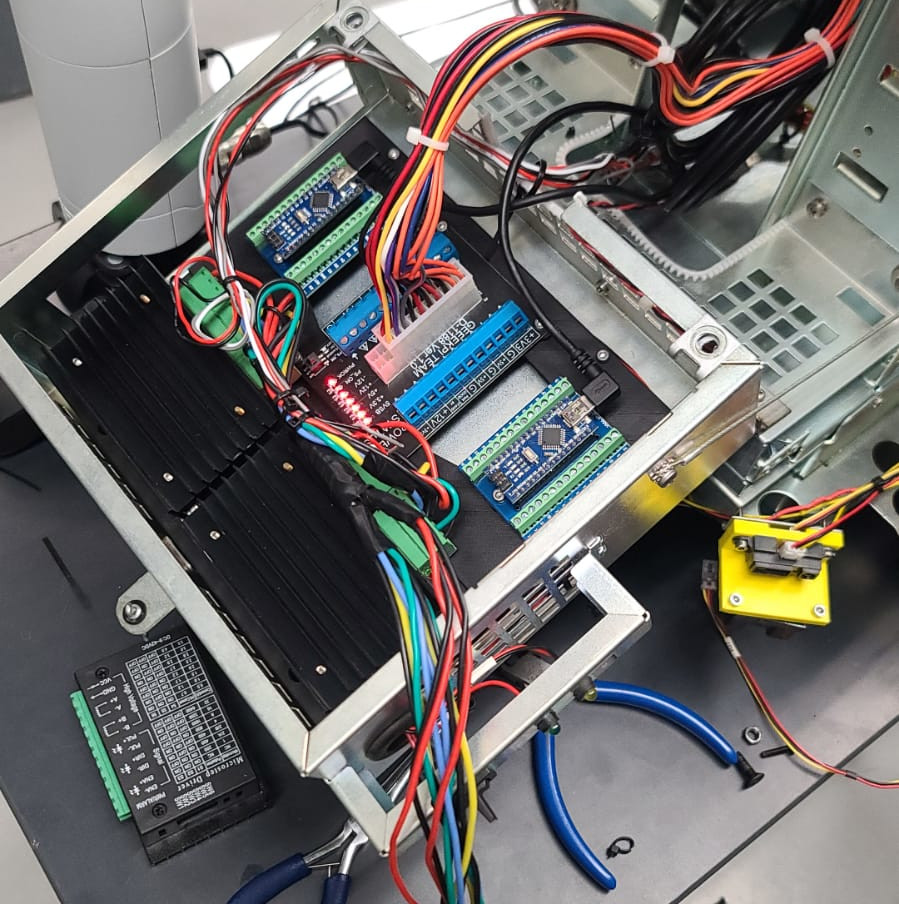
Control Box - inside
Now that the robot has been assembled and tested, it's time to work on the control box! Here's a picture of all the motor drivers inside the box.
{kind=link}
Control Box - front
This is the front. There is a 120mm fan used to create airflow within the control box. There is also a power button and 8 RGB LEDs used as status/error reporting lights.
{kind=link}
Control Box - top
This is the top of the control box. we have 2 usb plugs along with a RJ45 and HDMI ports. You can also see the Jetson Nano that is used to run ROS.
{kind=link}
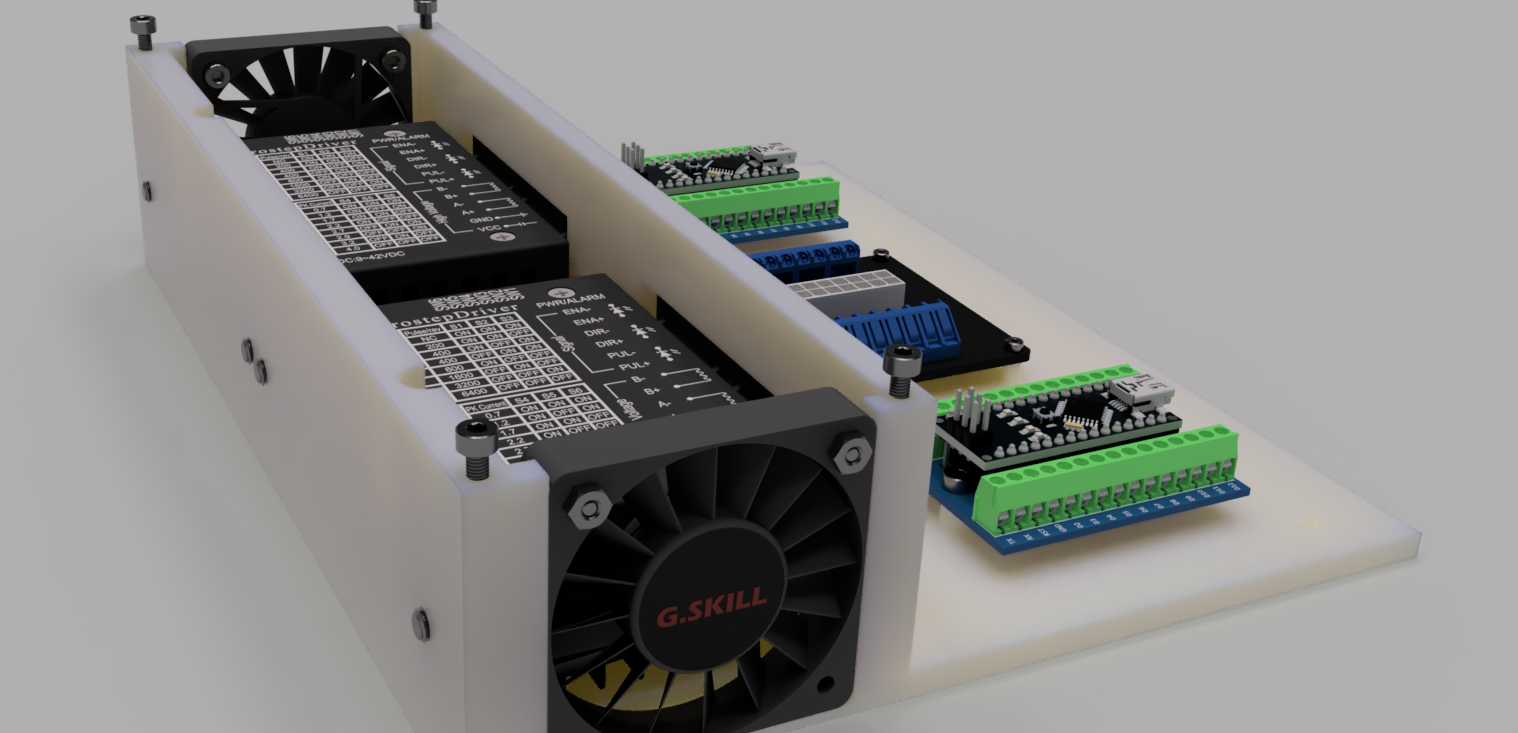
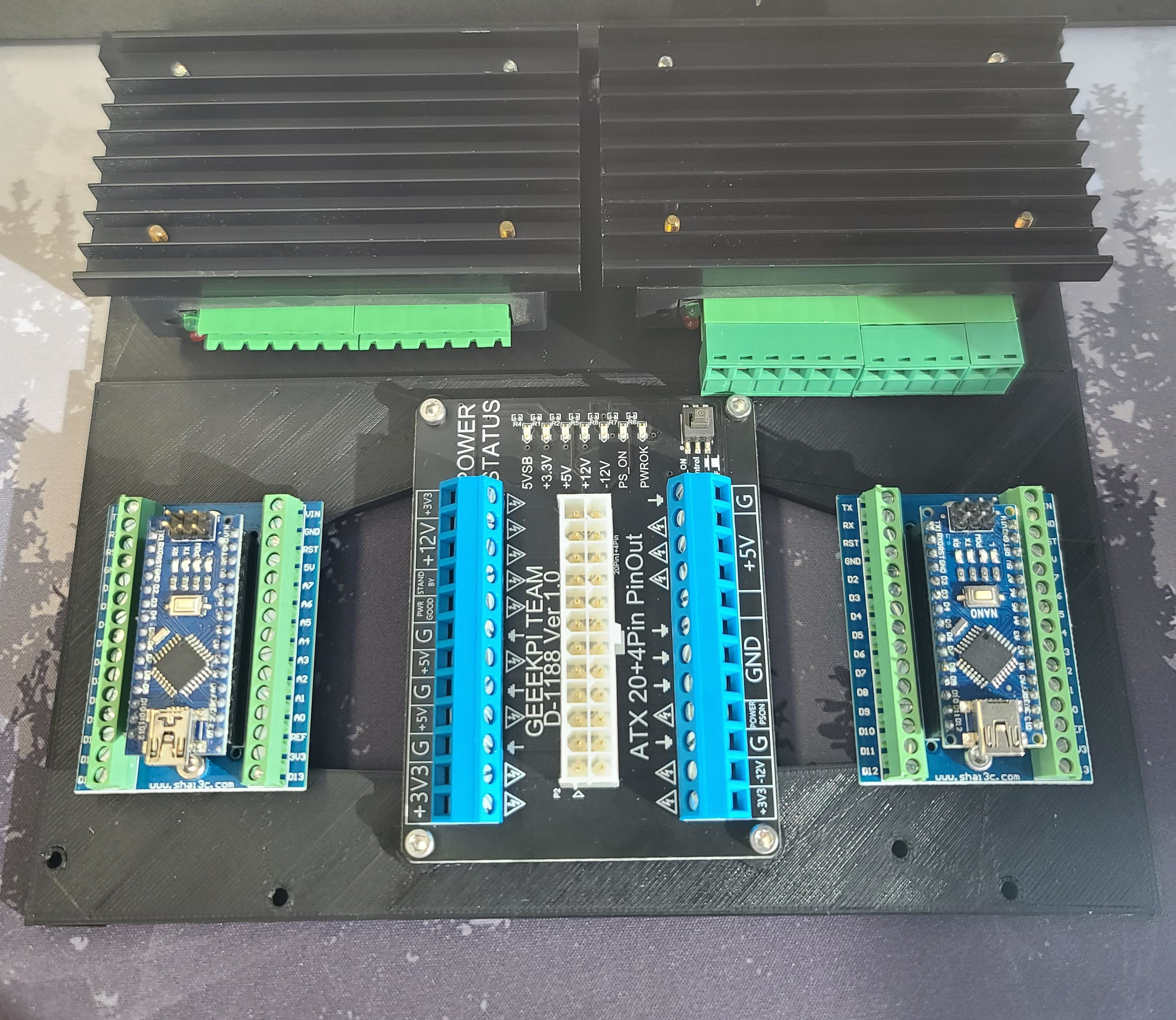
Control Box - PCB
This is the PCB that is the "master" of the robot arm. It communicates with every serial devices, send commands and receives the data from ROS to properly execute the IK solution.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
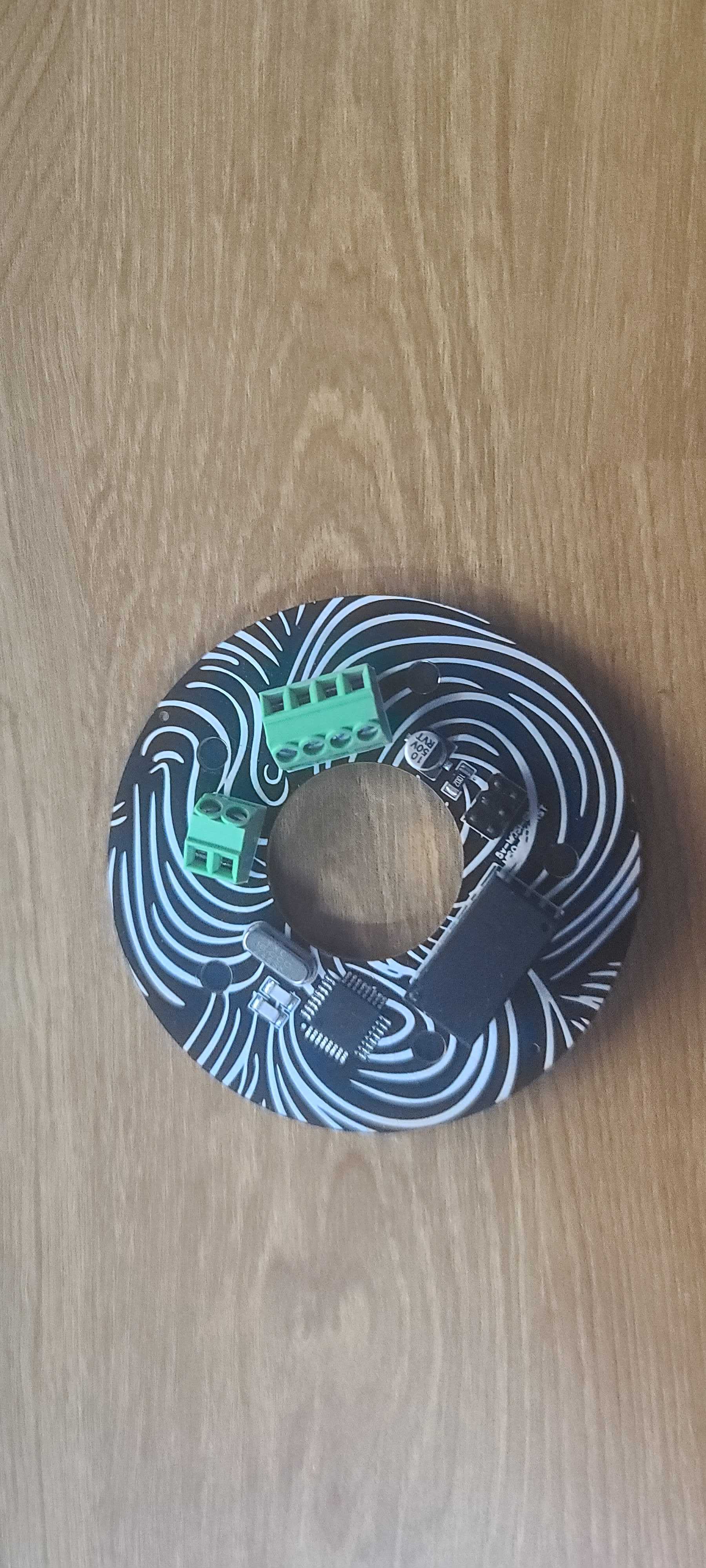
Magnetic PCB
Now that wiring is done, it's time to work on the accessorries! This is the inside electronics of the magnetic Gripper. A test of the magnetic gripper can be found Here.
{kind=link}
{kind=link}
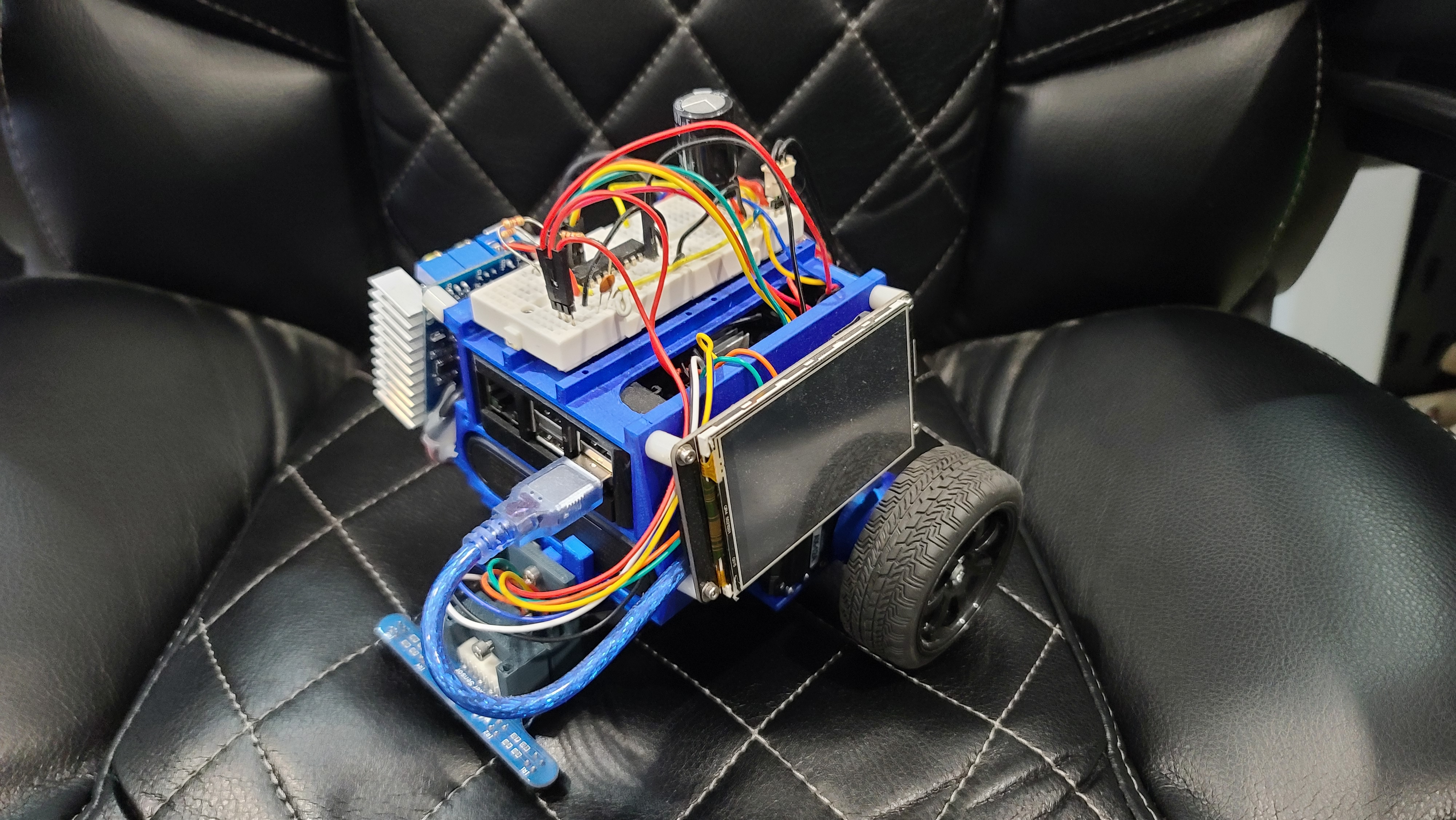
Onto programming!
The robot arm and the control box are now done. Now, it's time to start coding this thing! This picture shows a hardware replica I made of the robot that I could easily carry around in my backpack to test anywhere I went. Click Here to see the robot simulation in RVIZ! Click Here to see the first test between the simulation in RVIZ and real hardware!
{kind=link}

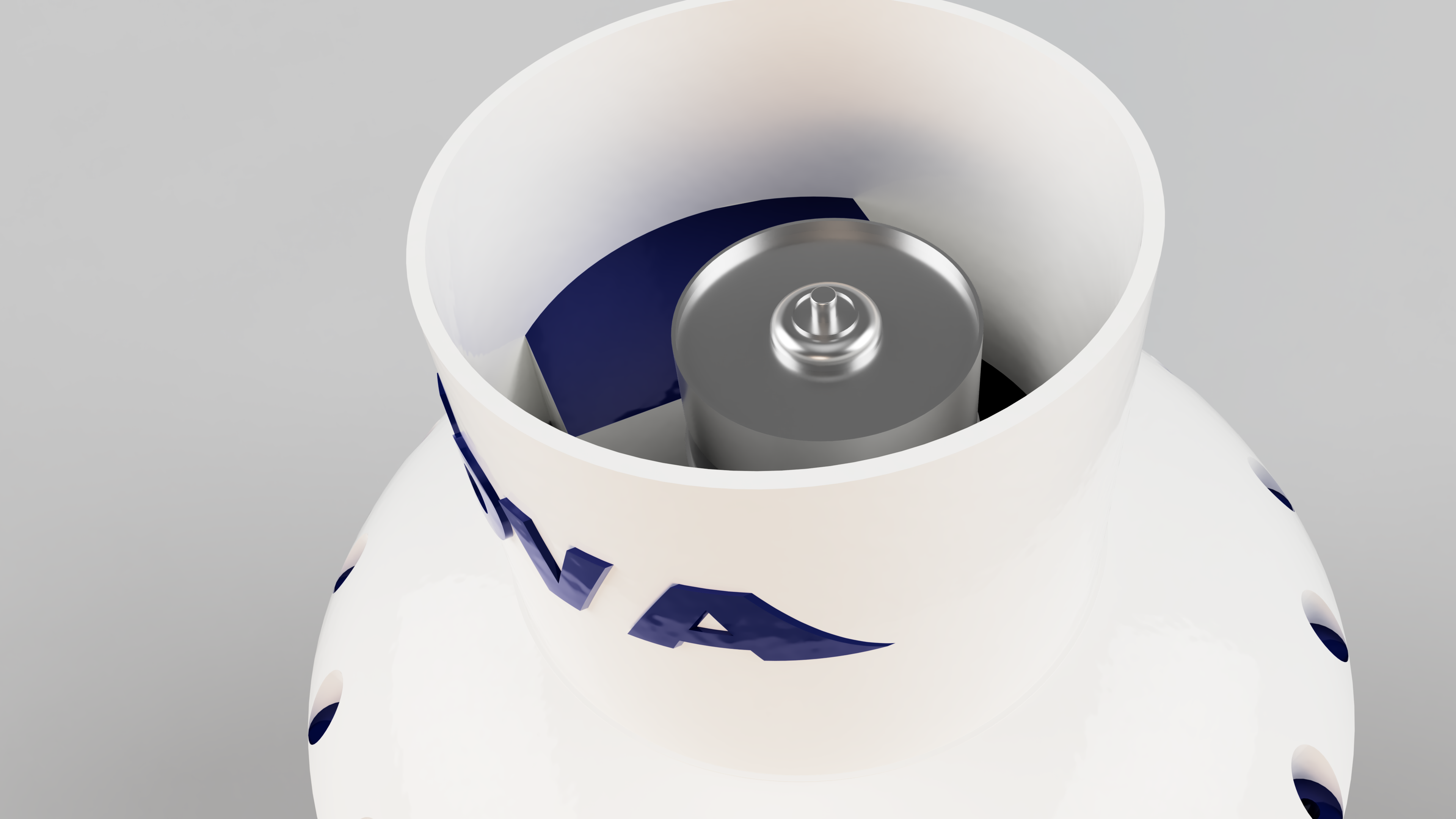
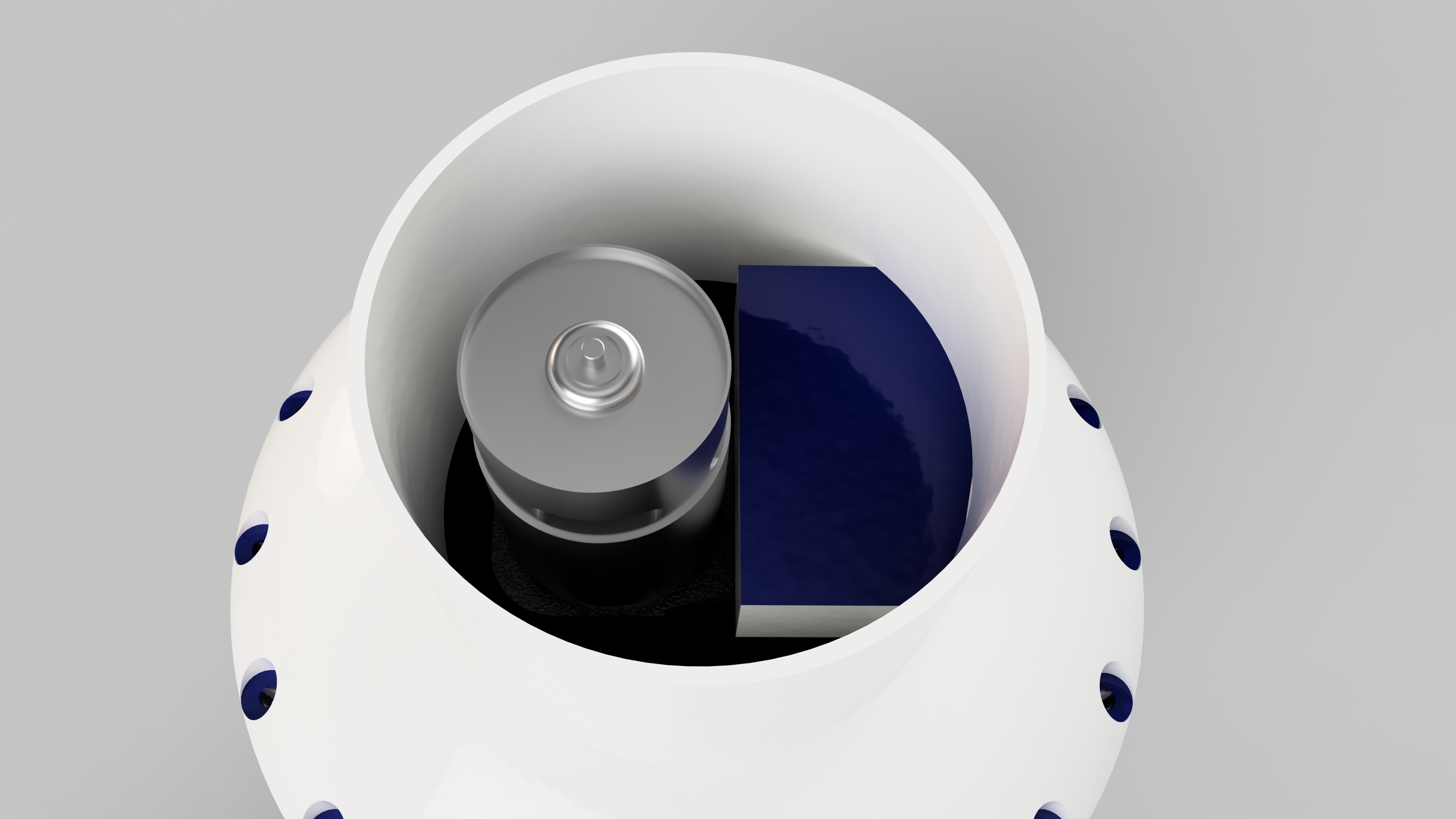
Kinova Bean Bag Gripper
This is a universal gripper I made for Kinova robotics. It uses 450g of BB balls and a 24v, 36w vaccum pump to suck out the air and trap the target object into the BBs.
Video
{kind=link}
Kinova Bean Bag Gripper
This is a universal gripper I made for Kinova robotics. It uses 450g of BB balls and a 24v, 36w vaccum pump to suck out the air and trap the target object into the BBs.
Video
{kind=link}
Kinova Bean Bag Gripper
This is a universal gripper I made for Kinova robotics. It uses 450g of BB balls and a 24v, 36w vaccum pump to suck out the air and trap the target object into the BBs.
Video
Kinova Bean Bag Gripper
This is a universal gripper I made for Kinova robotics. It uses 450g of BB balls and a 24v, 36w vaccum pump to suck out the air and trap the target object into the BBs.
Video
{kind=link}
Kinova Bean Bag Gripper working prototype
This is a universal gripper I made for Kinova robotics. It uses 450g of BB balls and a 24v, 36w vaccum pump to suck out the air and trap the target object into the BBs.
Video
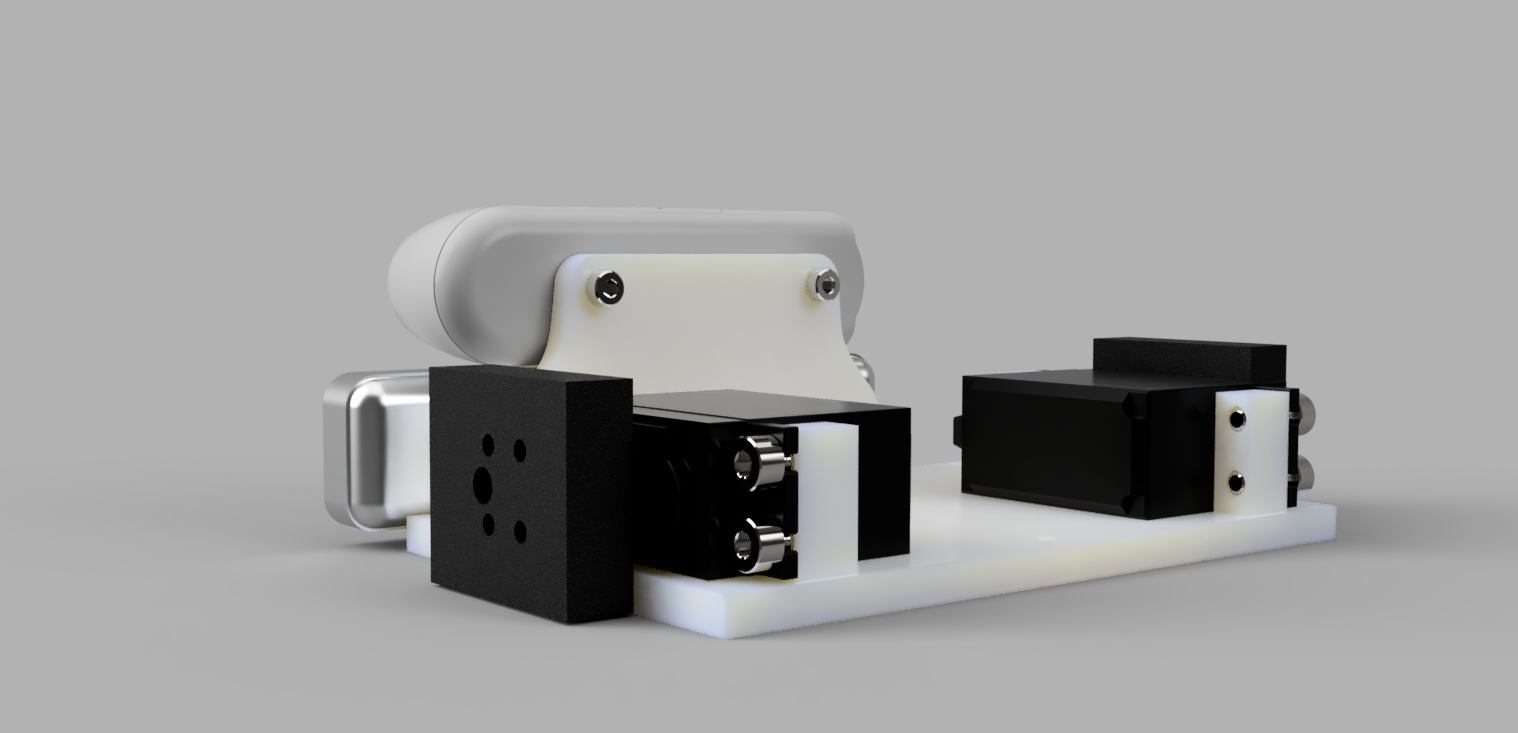
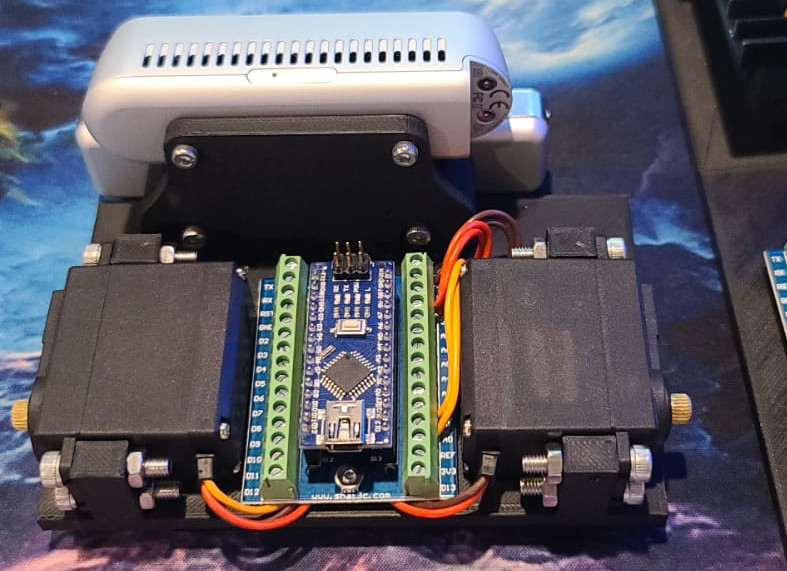
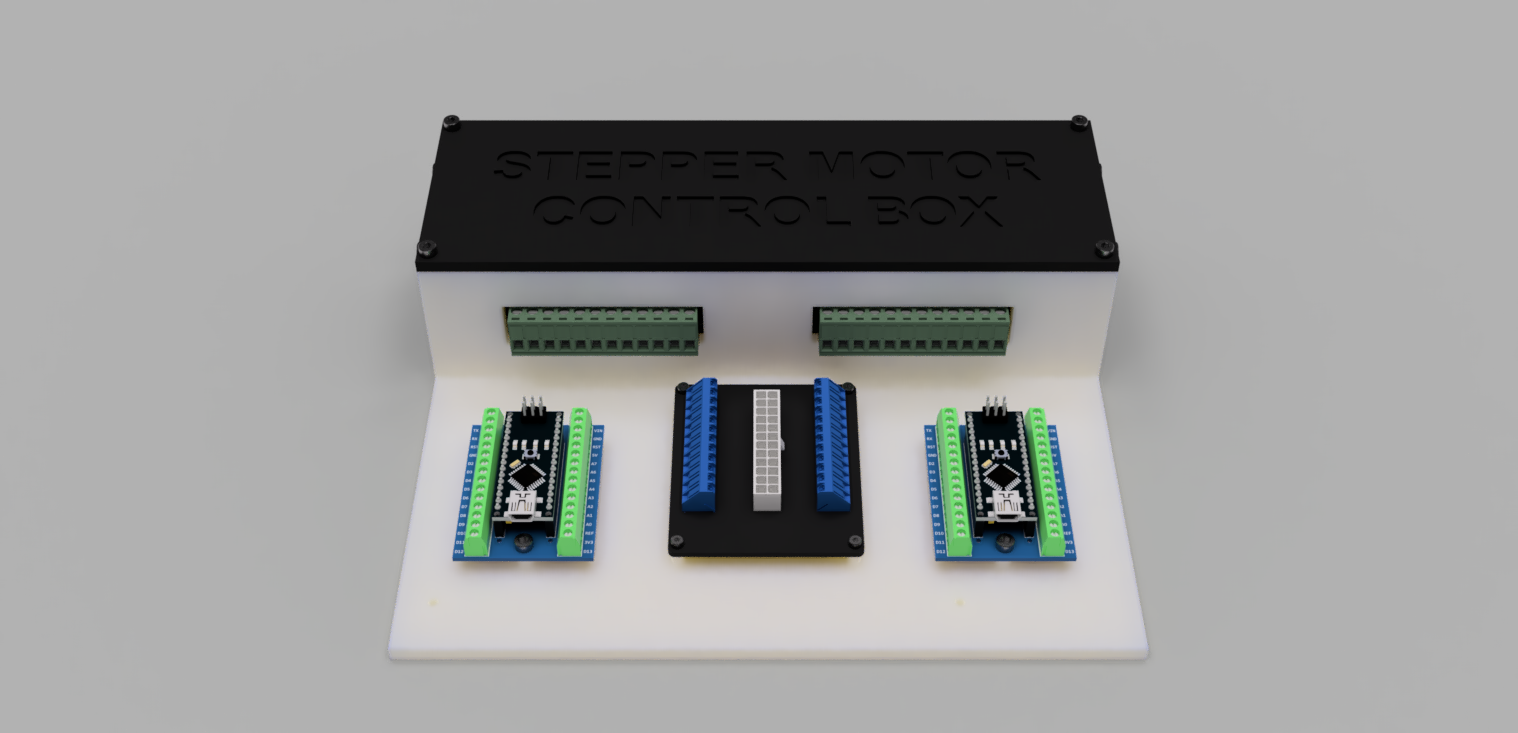
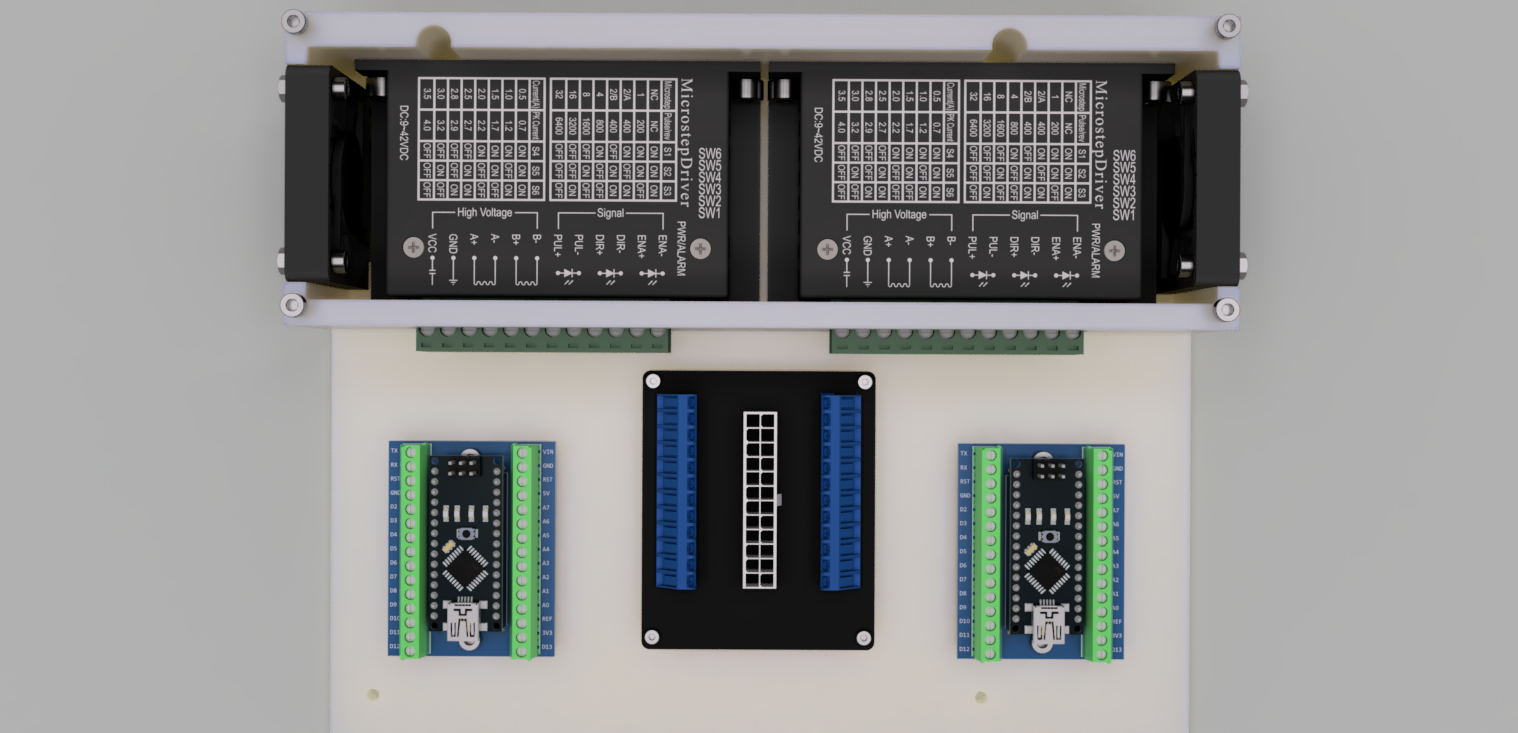
Custom PCBs
This is a custom Stepper motor driver PCB I designed as part of a different project. It uses the Trinamic TMC2160A-TA to silently run high power stepper motors.
{kind=link}
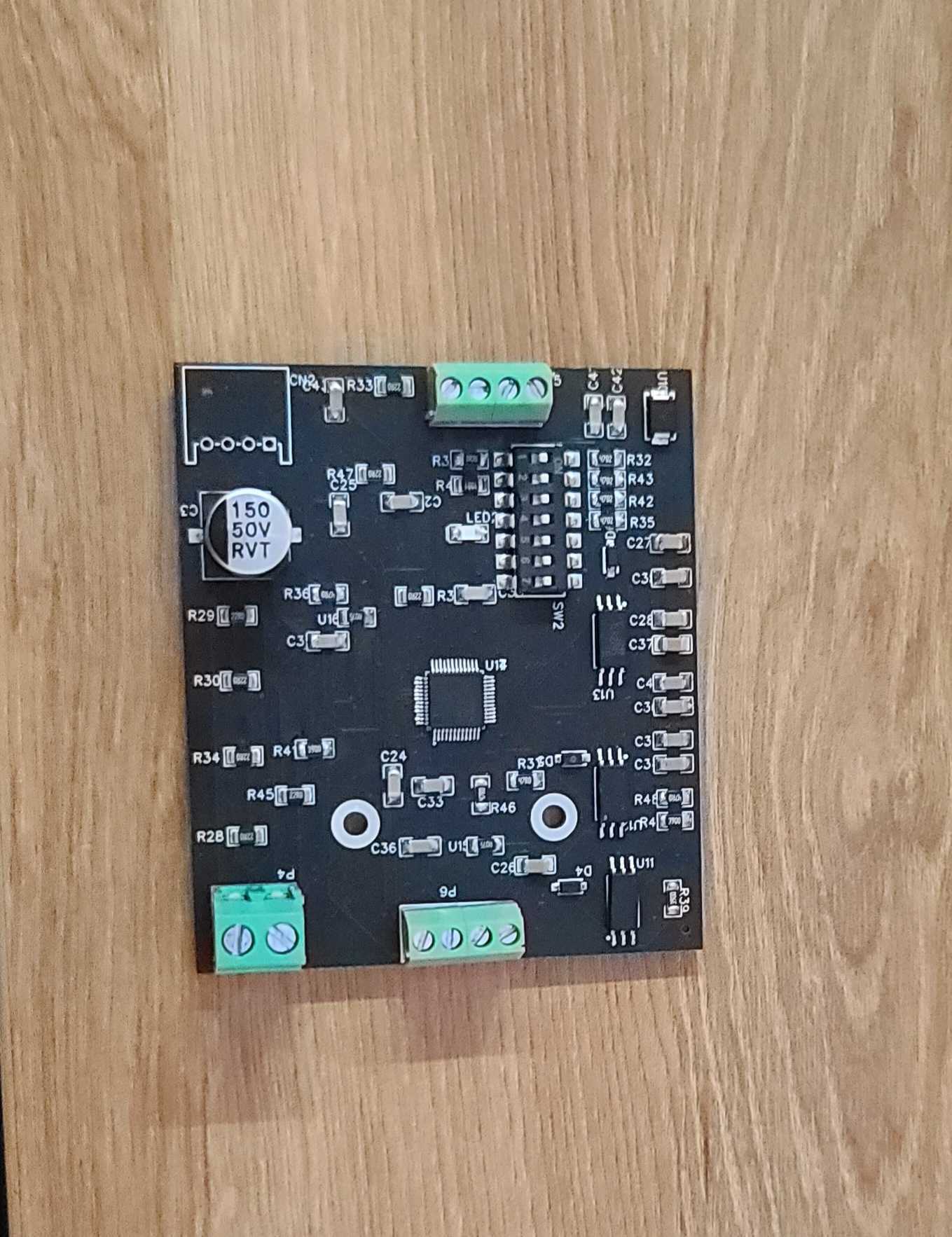
Custom DAQ PCB for I2C Sensors (final)
This is a custom DAQ (Data Acquisition) PCB I made to collect data from 7 I2C Sensor for a project. It uses a Atmega32u4 with an external crystal to collect the data, extract the values and combine them into a single message to be sent to a master device other I2C.
{kind=link}
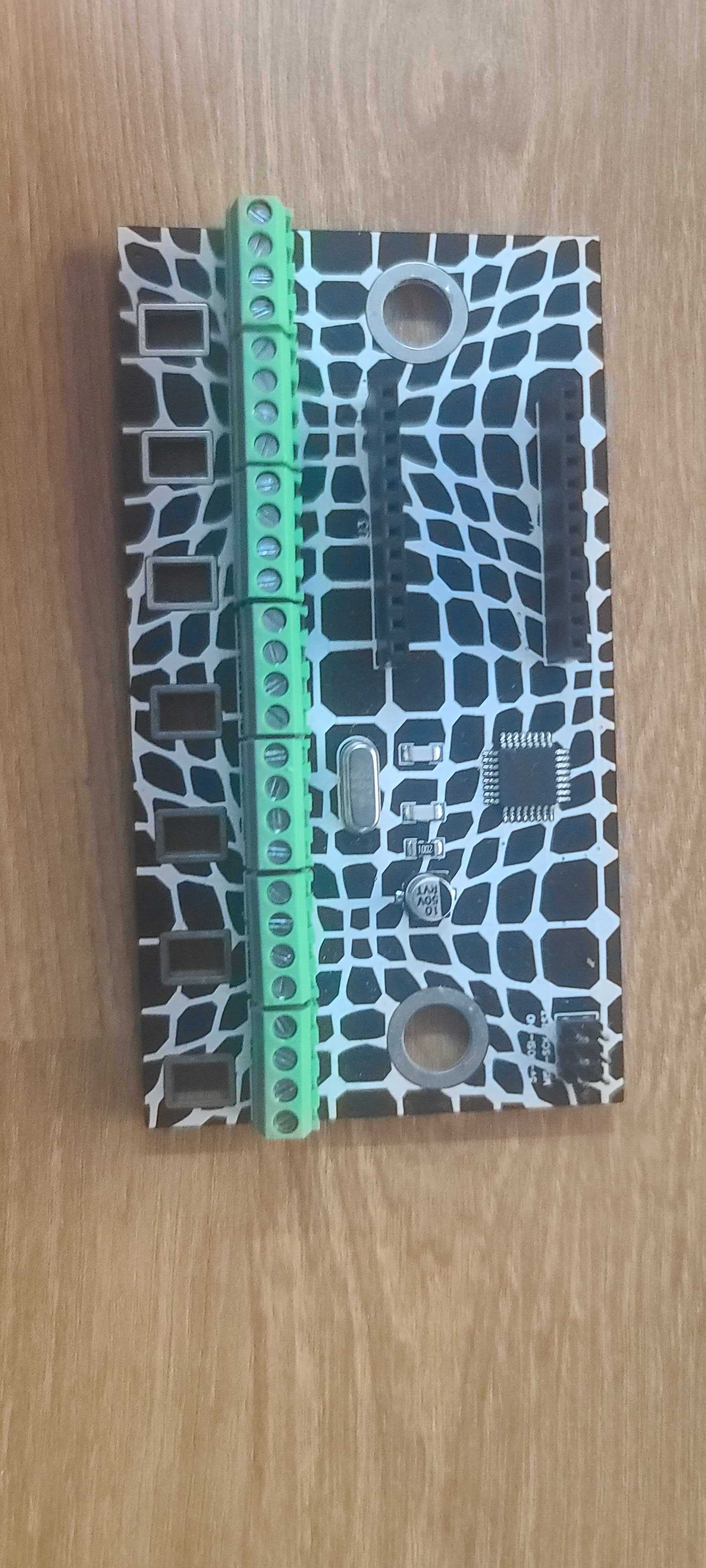
Custom DAQ PCB for I2C Sensors (prototype)
This is a custom DAQ (Data Acquisition) PCB I made to collect data from 7 I2C Sensor for a project. It uses a Atmega328p with an external crystal to collect the data, extract the values and combine them into a single message to be sent to a master device other I2C.
{kind=link}
BORAT Magnetic Gripper PCB (final)
This is a custom PCB I made for a magnetic gripper used on BORAT, my robot arm project. It uses a Atmega328au to receive commands from a Master over I2C to activate/deactivate the gripper. It also sends back information to the master over I2C.
{kind=link}
BORAT 2-Finger Gripper PCB (final)
This is a custom PCB I made for a 2-Finger gripper used on BORAT, my robot arm project. It uses a Atmega328au to receive commands from a Master over I2C to open/close the gripper. It also sends back information such as motor temperature, torque, position and closing distance to the master over I2C.
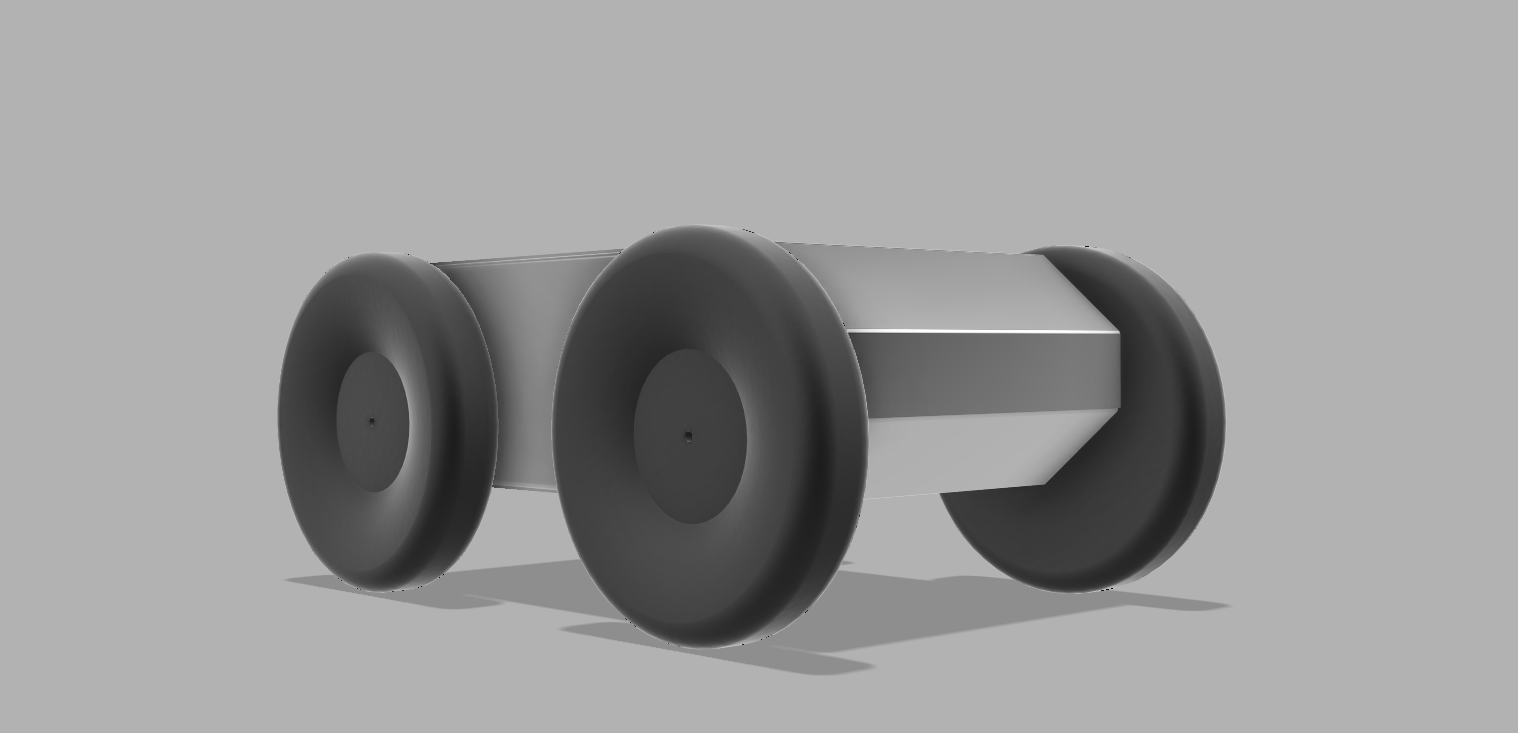
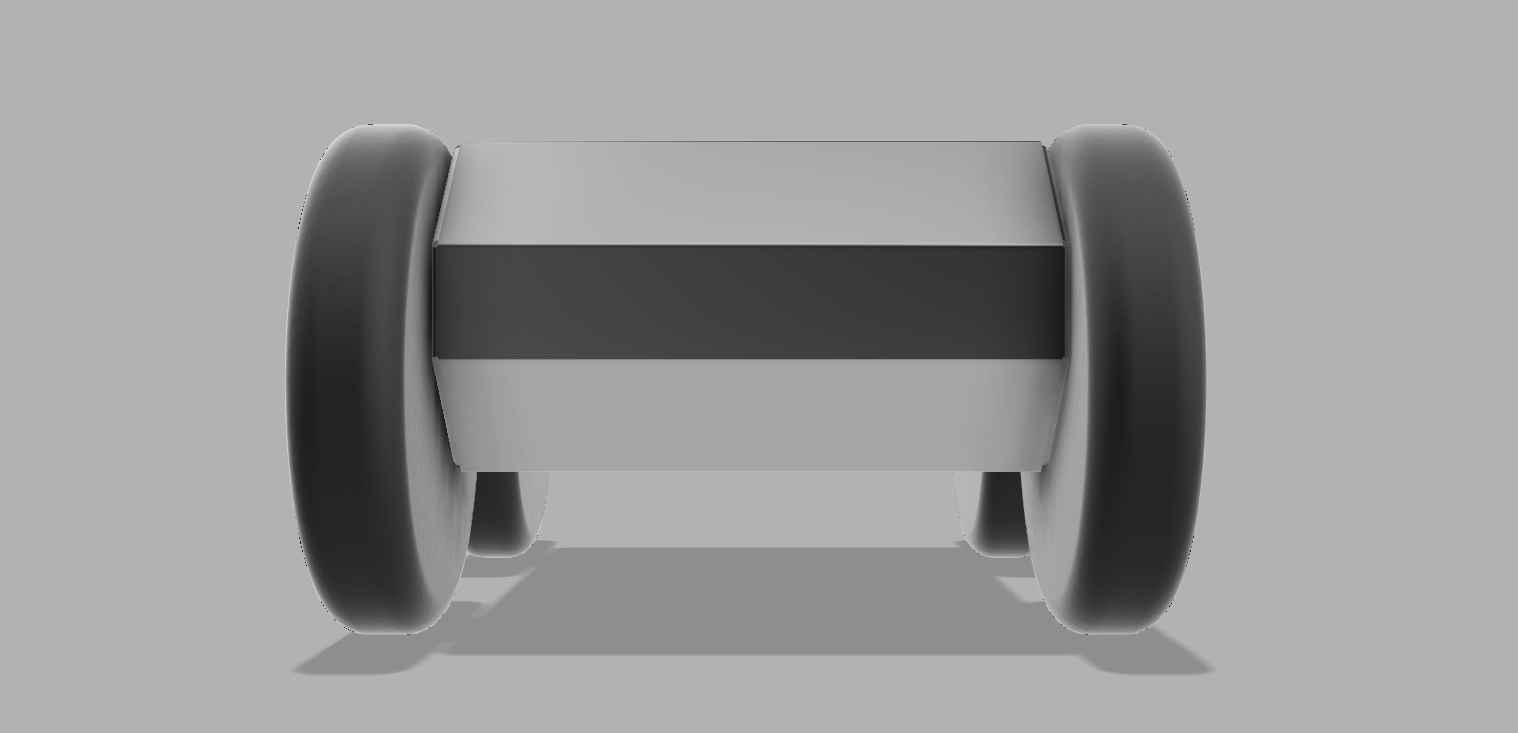
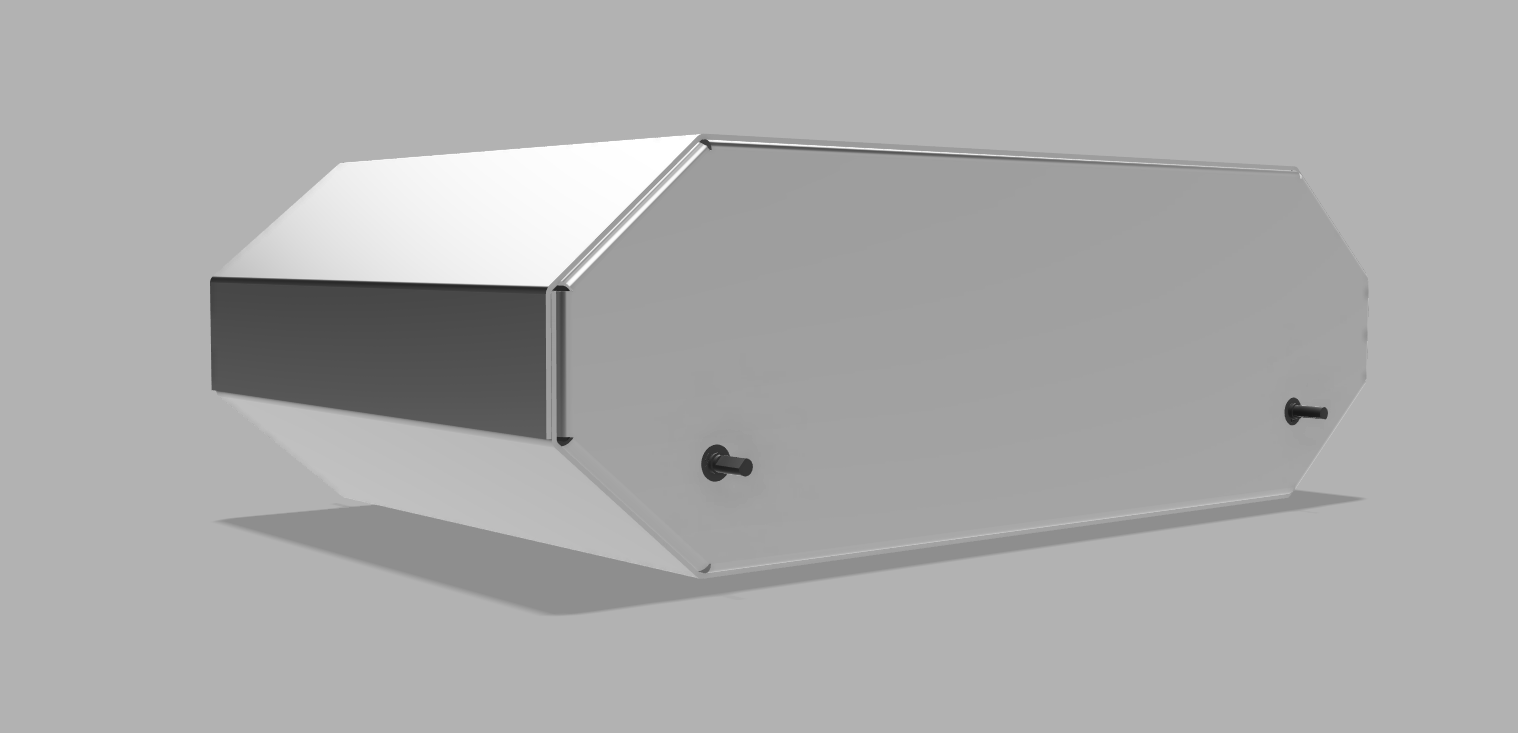
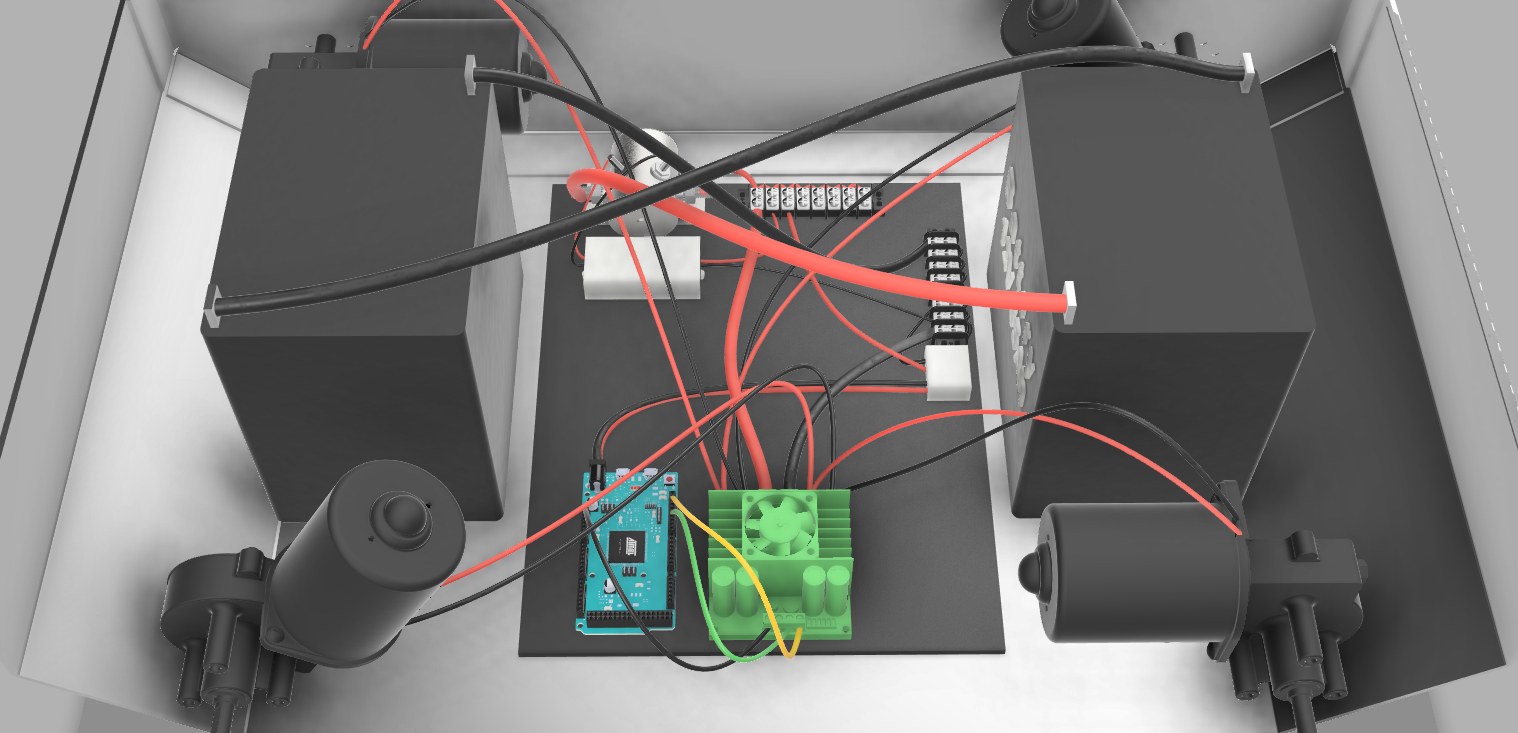
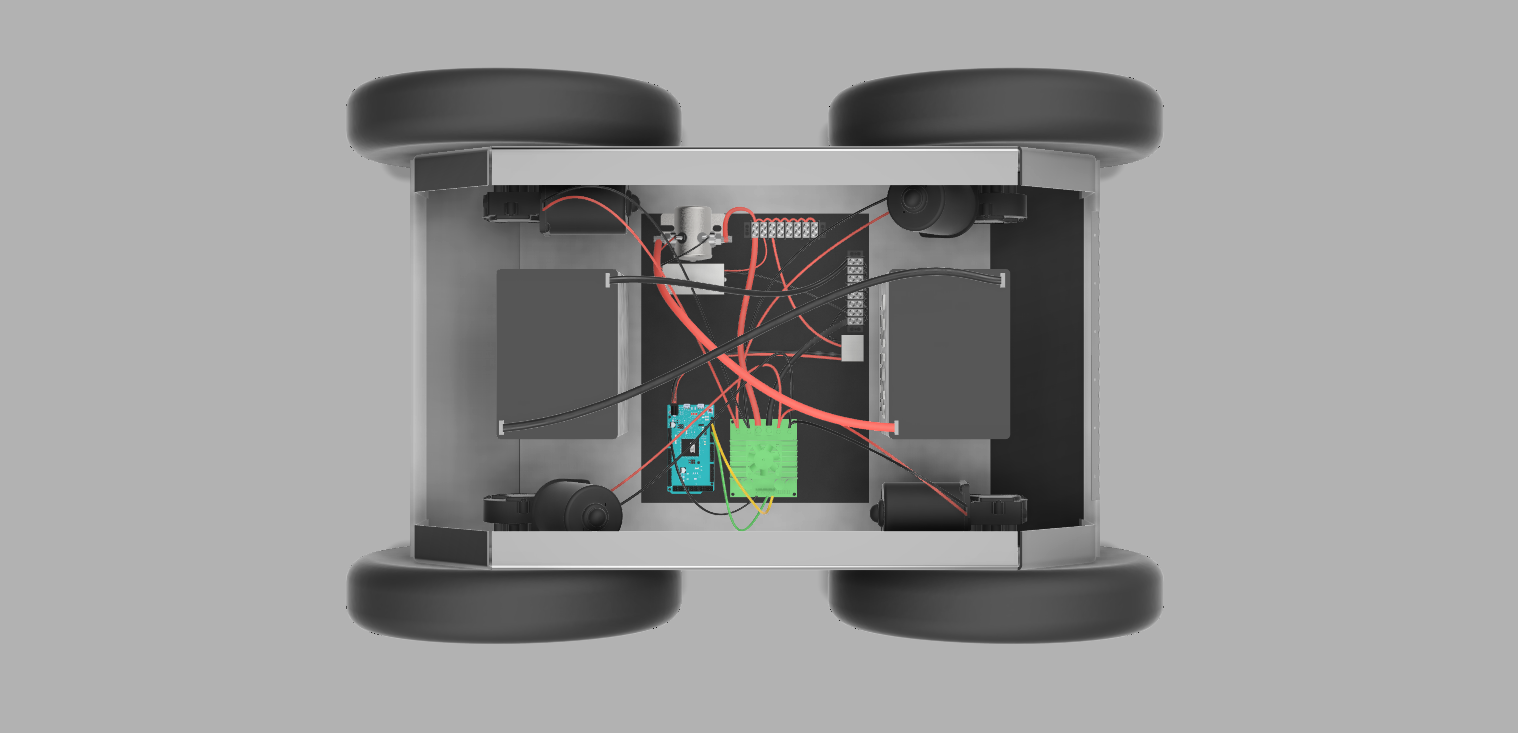
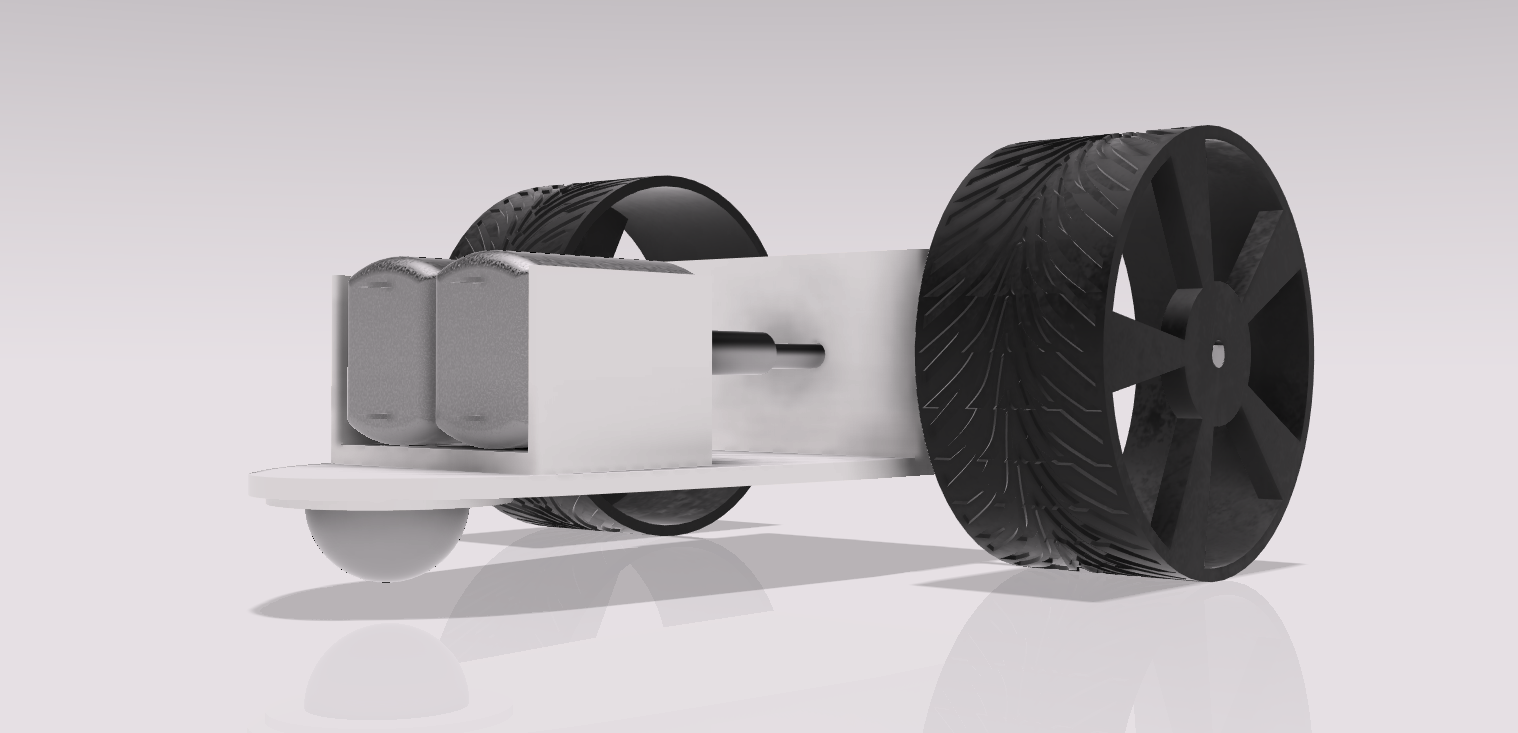
Expedition Rover
This expedition rover is a project I started to learn more about making robots using sheet metal fabrication. The project has been put on hold while I save up enough money for the sheet metal fabrication. It uses 4 motors and 2 12v 35Ah batteries for an estimated 3 hours of run time and 7 hours of charging at 10 amps. To maximize the battery life, I made an algorithm that constantly tracks the current draw of each motor to detect when a wheel slips or when the wheel is not making contact with the ground in order to cut the power for 1 second thus saving some battery. The top speed has been estimated to be around 1.4 m/s.
{kind=link}
Expedition Rover
This expedition rover is a project I started to learn more about making robots using sheet metal fabrication. The project has been put on hold while I save up enough money for the sheet metal fabrication. It uses 4 motors and 2 12v 35Ah batteries for an estimated 3 hours of run time and 7 hours of charging at 10 amps. To maximize the battery life, I made an algorithm that constantly tracks the current draw of each motor to detect when a wheel slips or when the wheel is not making contact with the ground in order to cut the power for 1 second thus saving some battery. The top speed has been estimated to be around 1.4 m/s.
{kind=link}
Expedition Rover
This expedition rover is a project I started to learn more about making robots using sheet metal fabrication. The project has been put on hold while I save up enough money for the sheet metal fabrication. It uses 4 motors and 2 12v 35Ah batteries for an estimated 3 hours of run time and 7 hours of charging at 10 amps. To maximize the battery life, I made an algorithm that constantly tracks the current draw of each motor to detect when a wheel slips or when the wheel is not making contact with the ground in order to cut the power for 1 second thus saving some battery. The top speed has been estimated to be around 1.4 m/s.
{kind=link}
Expedition Rover
This expedition rover is a project I started to learn more about making robots using sheet metal fabrication. The project has been put on hold while I save up enough money for the sheet metal fabrication. It uses 4 motors and 2 12v 35Ah batteries for an estimated 3 hours of run time and 7 hours of charging at 10 amps. To maximize the battery life, I made an algorithm that constantly tracks the current draw of each motor to detect when a wheel slips or when the wheel is not making contact with the ground in order to cut the power for 1 second thus saving some battery. The top speed has been estimated to be around 1.4 m/s.
{kind=link}
Expedition Rover
This expedition rover is a project I started to learn more about making robots using sheet metal fabrication. The project has been put on hold while I save up enough money for the sheet metal fabrication. It uses 4 motors and 2 12v 35Ah batteries for an estimated 3 hours of run time and 7 hours of charging at 10 amps. To maximize the battery life, I made an algorithm that constantly tracks the current draw of each motor to detect when a wheel slips or when the wheel is not making contact with the ground in order to cut the power for 1 second thus saving some battery. The top speed has been estimated to be around 1.4 m/s.
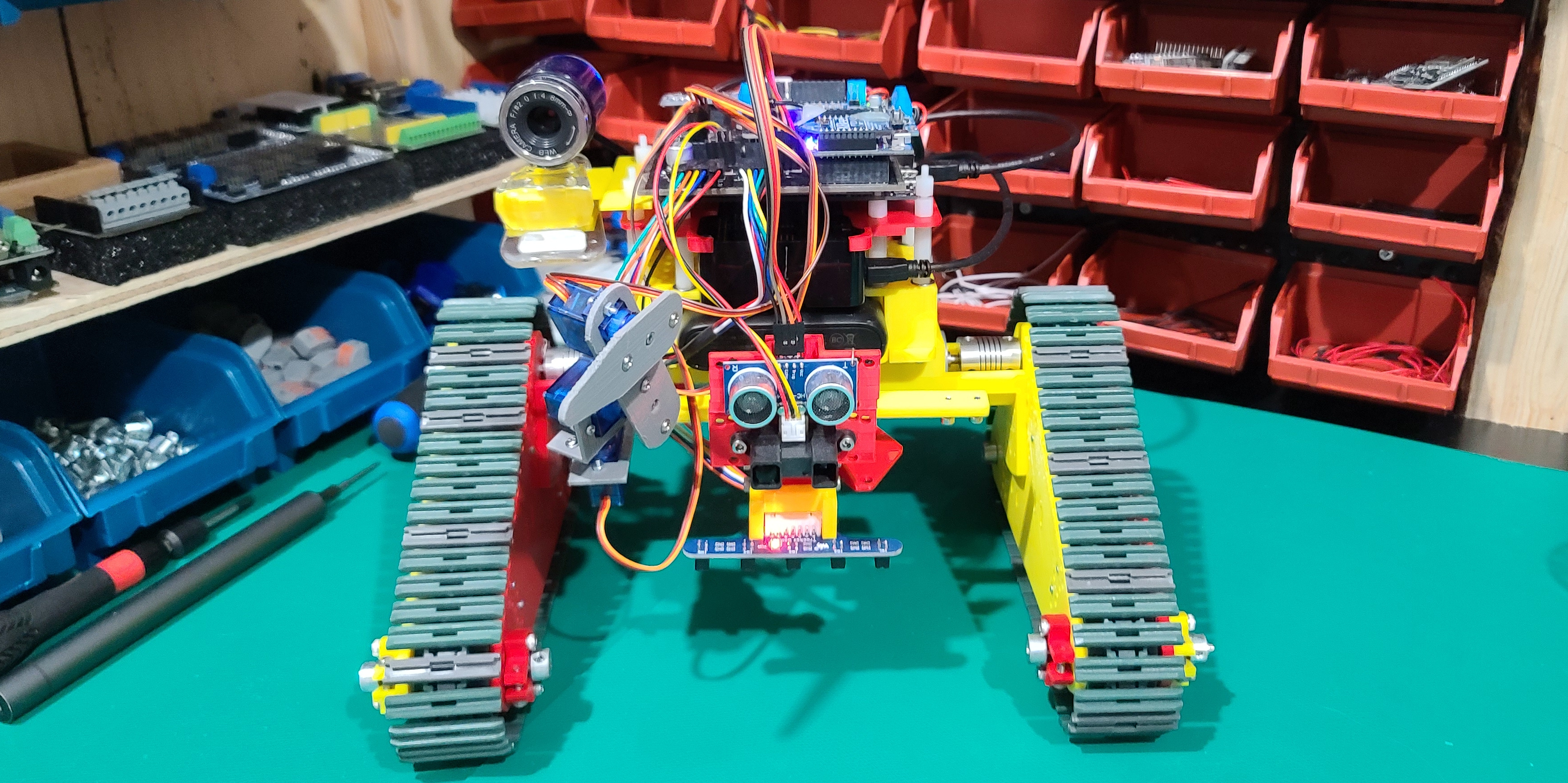
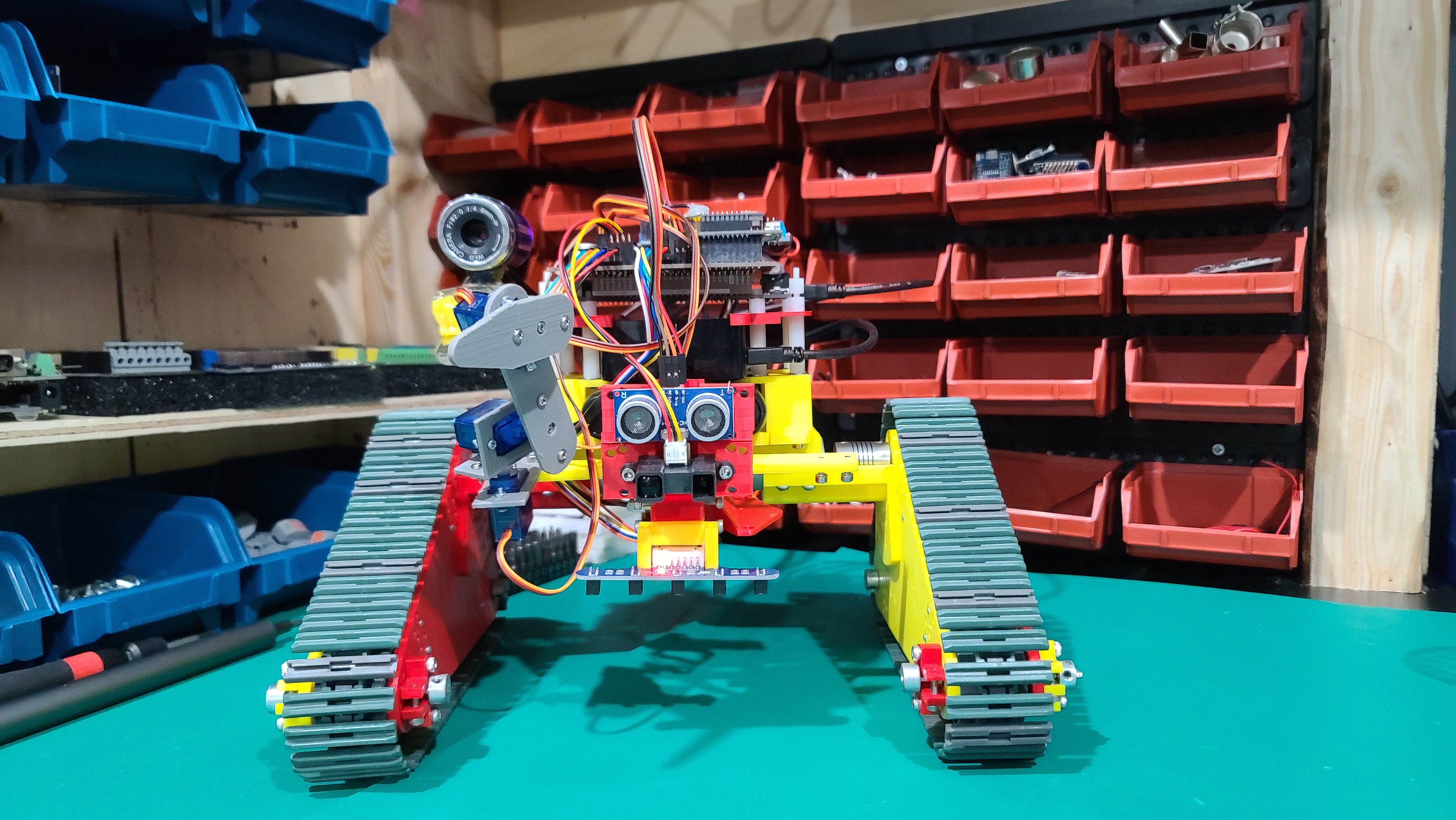
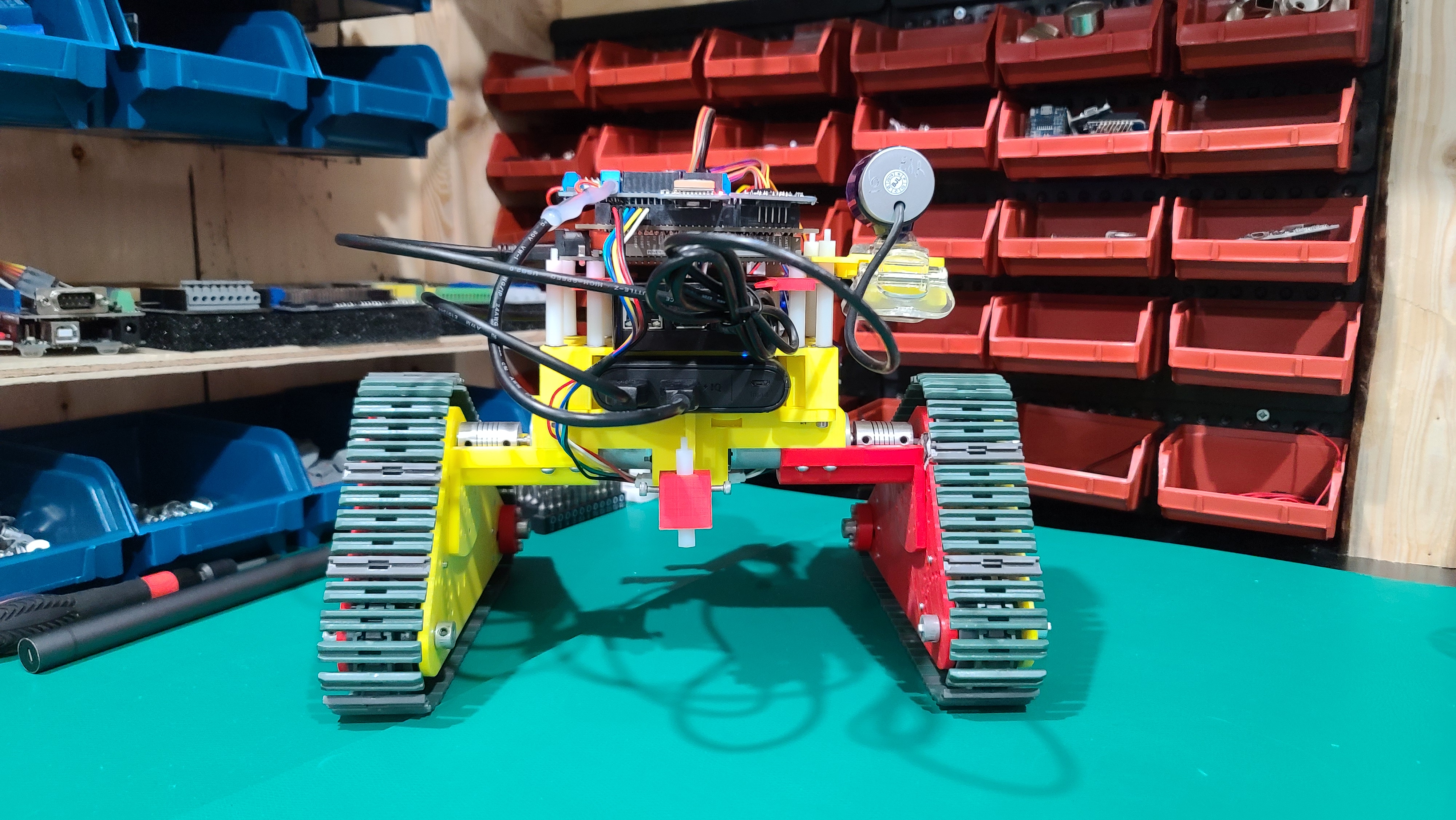
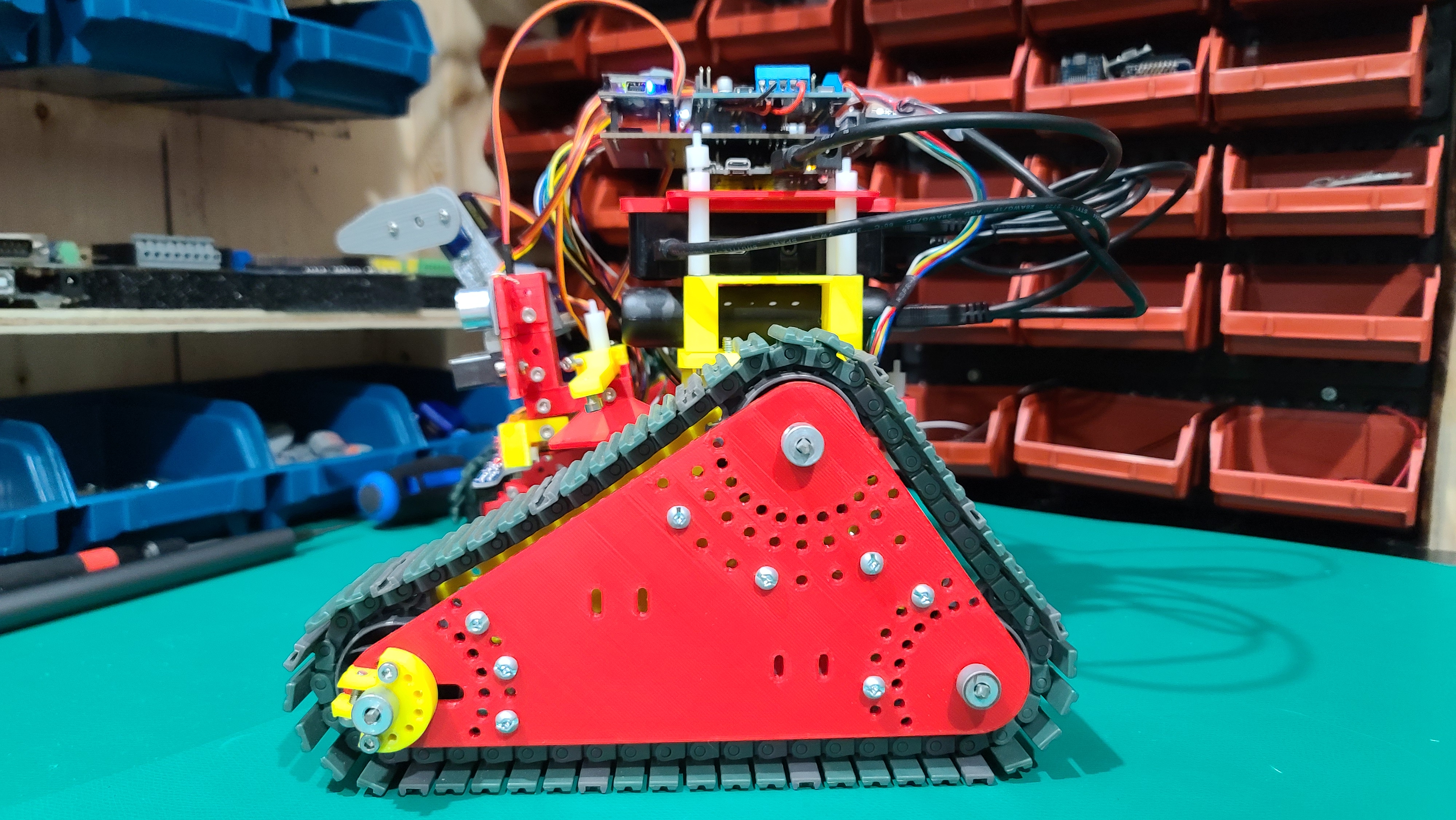
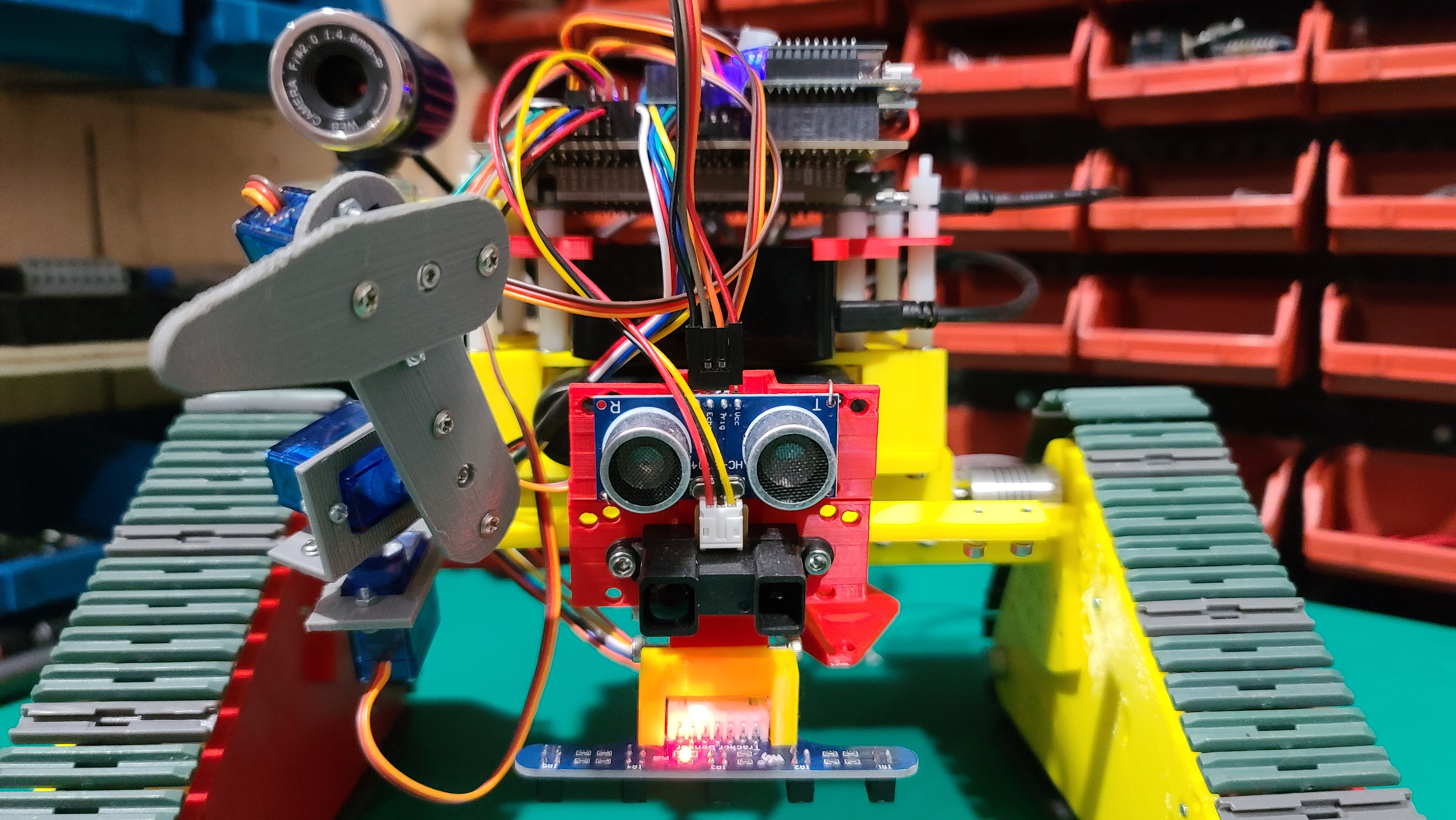
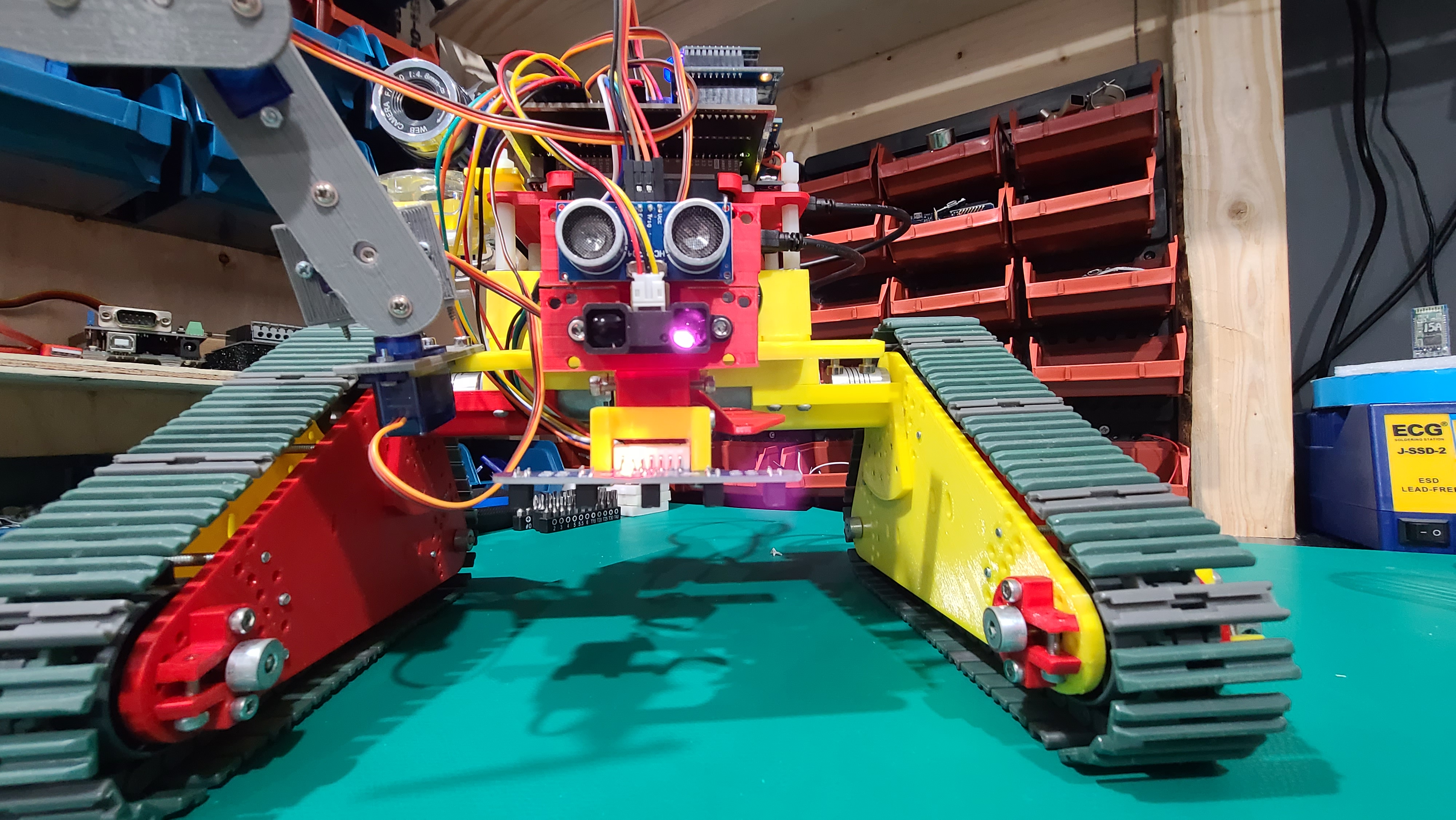
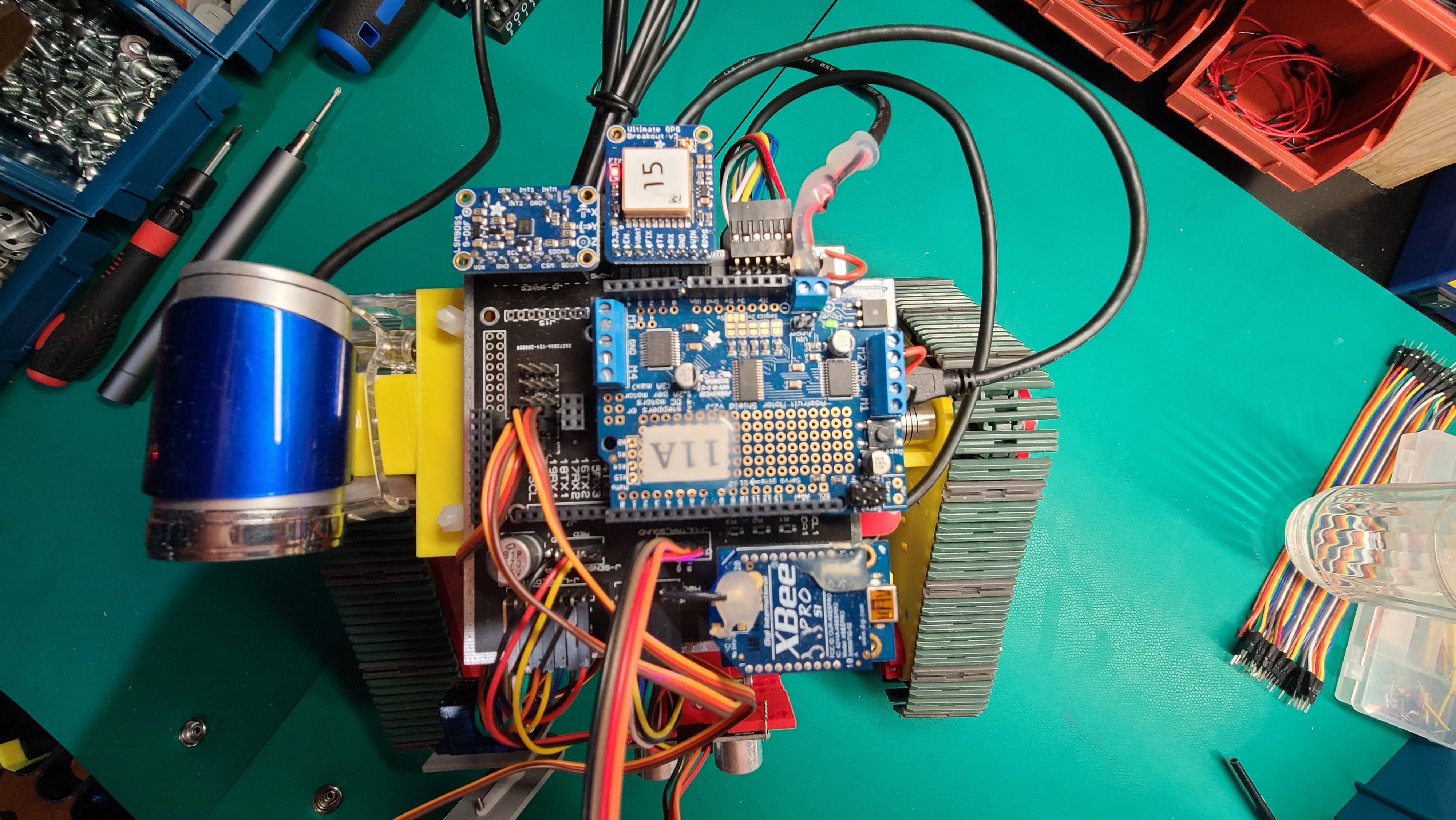
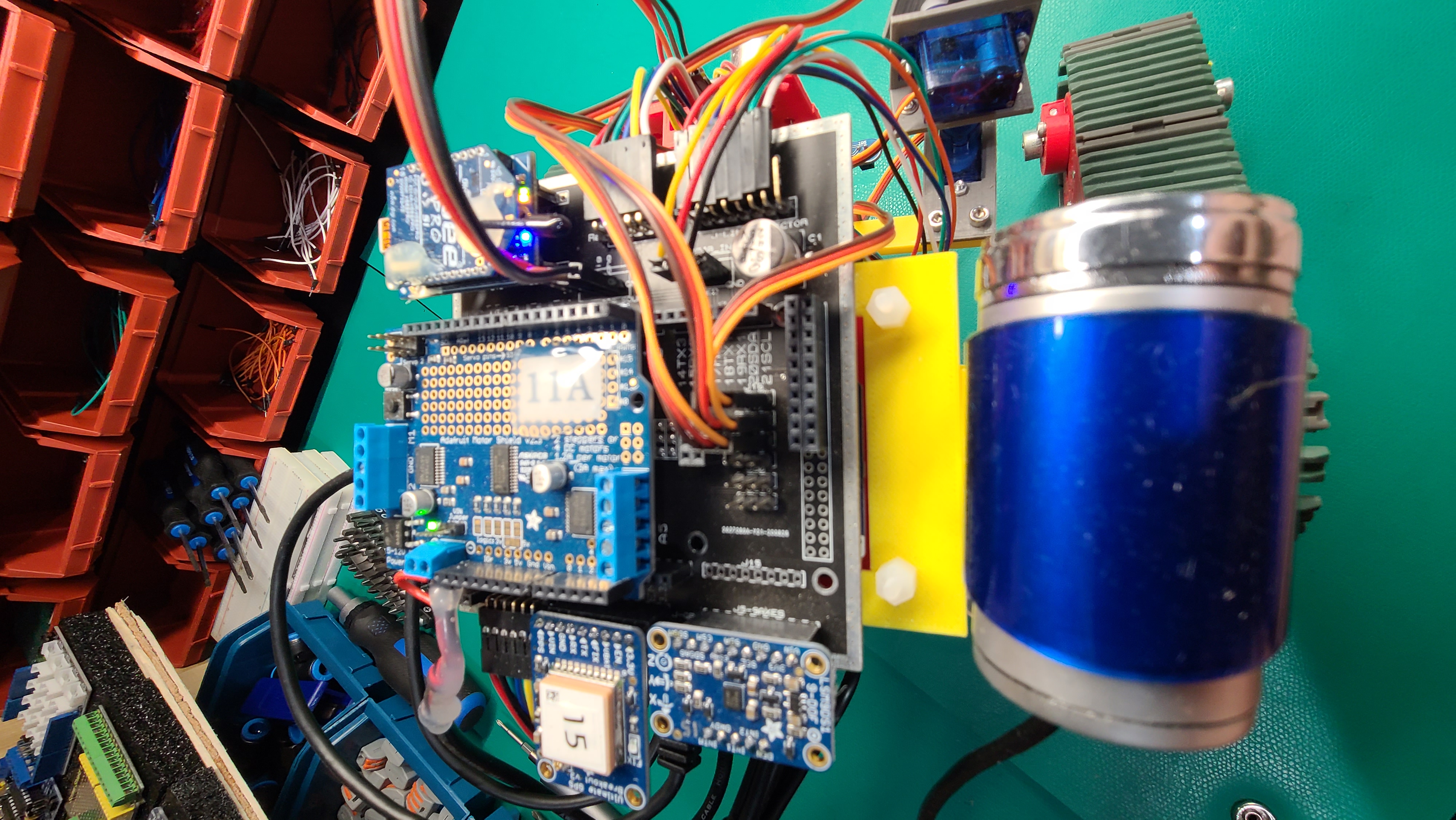
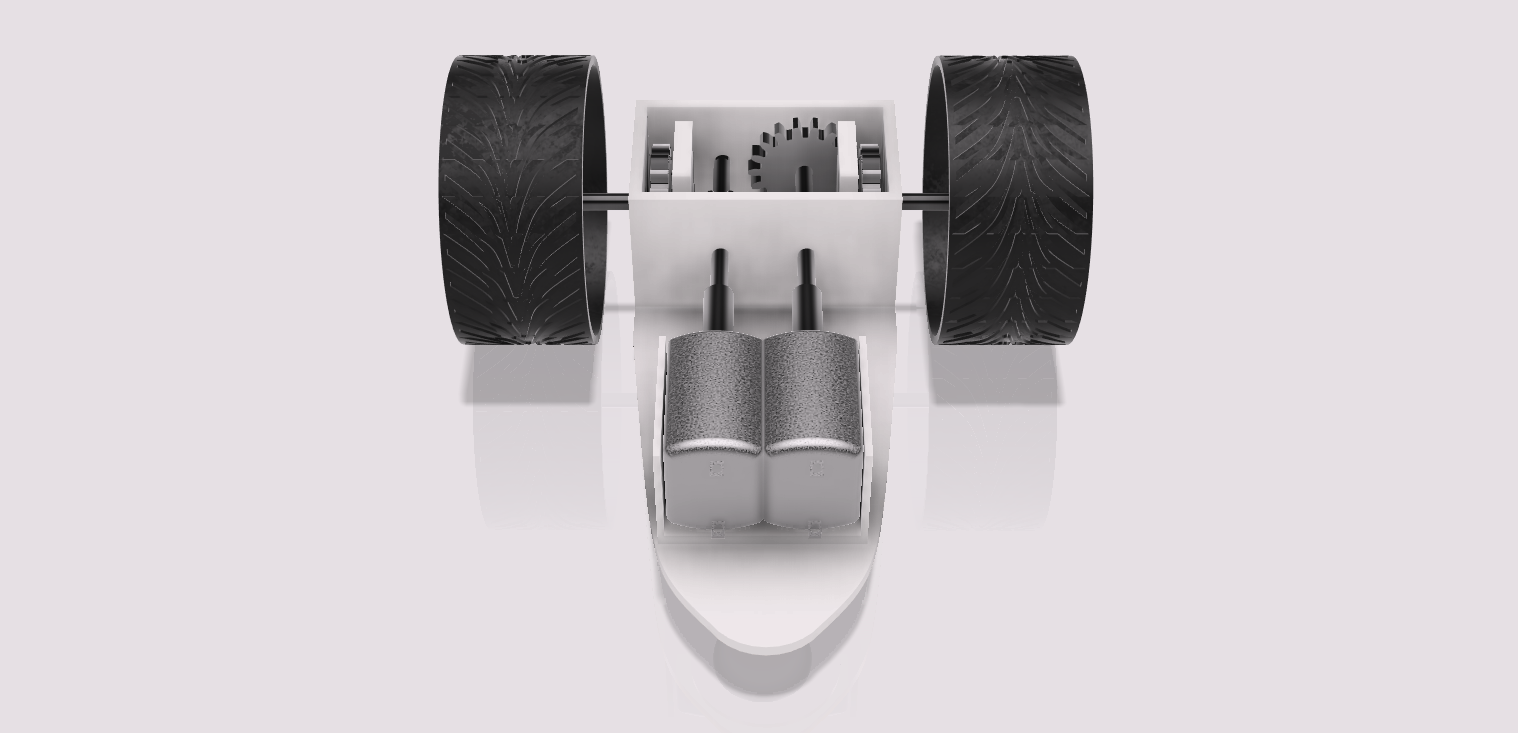
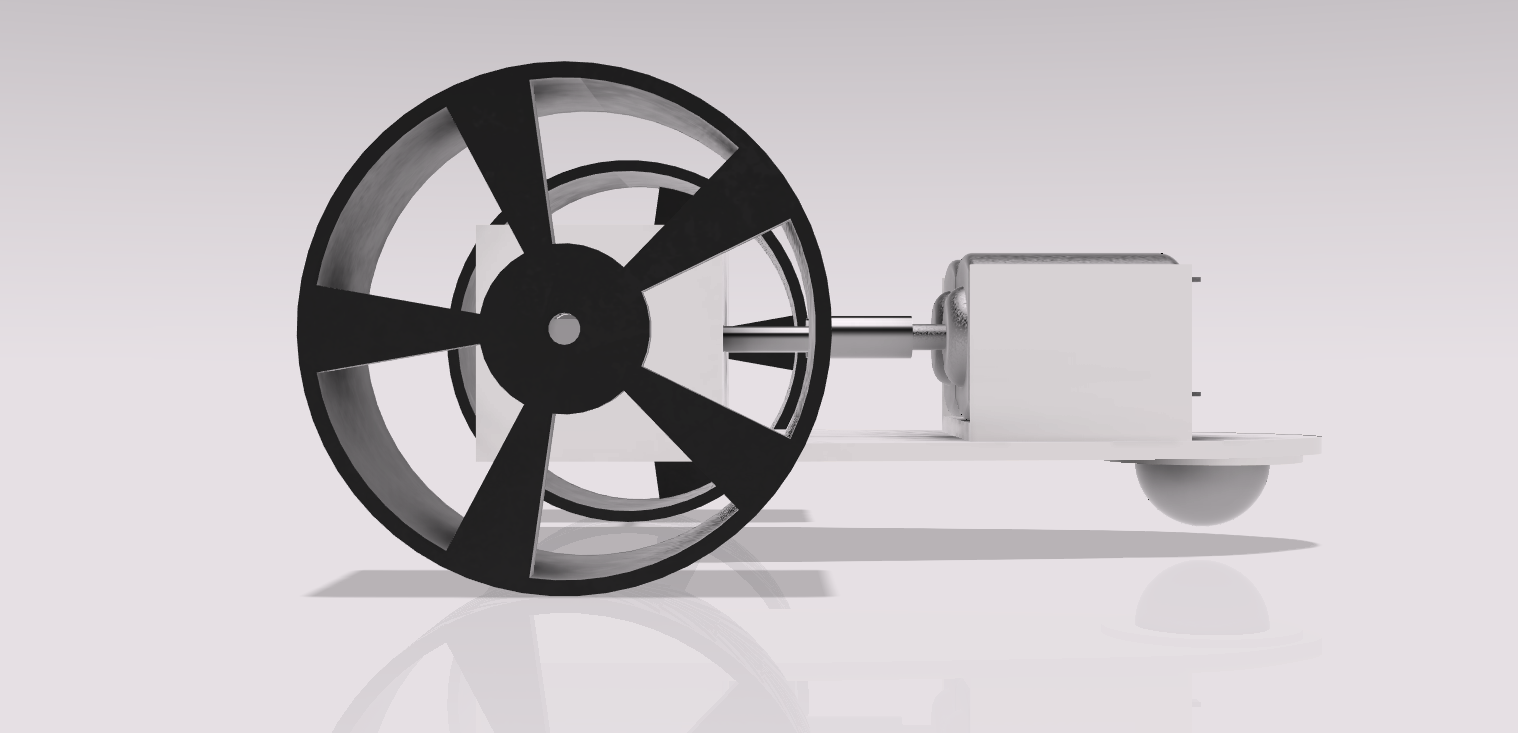
Tracked Robot
Last year, I was asked by my teachers to make a new robot that students could use as platform for future coding projects and lessons. I decided to design a tracked robot to challenge my 3d modeling skills. I also tought that tracks would make the robot cooler but, in the end, the extra assembly required for tracks and the fact that they barely had any grip on the floor made me change them for rubber wheels. The robot is fully 3d printed, uses in total 6 sensors and is programmed in python, pjp, sql, html5, c, c++, c# and javascript.
{kind=link}
Tracked Robot
Last year, I was asked by my teachers to make a new robot that students could use as platform for future coding projects and lessons. I decided to design a tracked robot to challenge my 3d modeling skills. I also tought that tracks would make the robot cooler but, in the end, the extra assembly required for tracks and the fact that they barely had any grip on the floor made me change them for rubber wheels. The robot is fully 3d printed, uses in total 6 sensors and is programmed in python, pjp, sql, html5, c, c++, c# and javascript.
{kind=link}
Tracked Robot
Last year, I was asked by my teachers to make a new robot that students could use as platform for future coding projects and lessons. I decided to design a tracked robot to challenge my 3d modeling skills. I also tought that tracks would make the robot cooler but, in the end, the extra assembly required for tracks and the fact that they barely had any grip on the floor made me change them for rubber wheels. The robot is fully 3d printed, uses in total 6 sensors and is programmed in python, pjp, sql, html5, c, c++, c# and javascript.
{kind=link}
Tracked Robot
Last year, I was asked by my teachers to make a new robot that students could use as platform for future coding projects and lessons. I decided to design a tracked robot to challenge my 3d modeling skills. I also tought that tracks would make the robot cooler but, in the end, the extra assembly required for tracks and the fact that they barely had any grip on the floor made me change them for rubber wheels. The robot is fully 3d printed, uses in total 6 sensors and is programmed in python, pjp, sql, html5, c, c++, c# and javascript.
{kind=link}
Tracked Robot
Last year, I was asked by my teachers to make a new robot that students could use as platform for future coding projects and lessons. I decided to design a tracked robot to challenge my 3d modeling skills. I also tought that tracks would make the robot cooler but, in the end, the extra assembly required for tracks and the fact that they barely had any grip on the floor made me change them for rubber wheels. The robot is fully 3d printed, uses in total 6 sensors and is programmed in python, pjp, sql, html5, c, c++, c# and javascript.
{kind=link}
Tracked Robot
Last year, I was asked by my teachers to make a new robot that students could use as platform for future coding projects and lessons. I decided to design a tracked robot to challenge my 3d modeling skills. I also tought that tracks would make the robot cooler but, in the end, the extra assembly required for tracks and the fact that they barely had any grip on the floor made me change them for rubber wheels. The robot is fully 3d printed, uses in total 6 sensors and is programmed in python, pjp, sql, html5, c, c++, c# and javascript.
{kind=link}
Tracked Robot
Last year, I was asked by my teachers to make a new robot that students could use as platform for future coding projects and lessons. I decided to design a tracked robot to challenge my 3d modeling skills. I also tought that tracks would make the robot cooler but, in the end, the extra assembly required for tracks and the fact that they barely had any grip on the floor made me change them for rubber wheels. The robot is fully 3d printed, uses in total 6 sensors and is programmed in python, pjp, sql, html5, c, c++, c# and javascript.
{kind=link}
Tracked Robot
Last year, I was asked by my teachers to make a new robot that students could use as platform for future coding projects and lessons. I decided to design a tracked robot to challenge my 3d modeling skills. I also tought that tracks would make the robot cooler but, in the end, the extra assembly required for tracks and the fact that they barely had any grip on the floor made me change them for rubber wheels. The robot is fully 3d printed, uses in total 6 sensors and is programmed in python, pjp, sql, html5, c, c++, c# and javascript.
MiniRobot
This MiniRobot, unfortunately, never saw the light of day. These were supposed to be super small, cost effective "battle bots" made to be disabled with specifics hits. Altough the idea of having robot battles in class is cool, the education value just wasn't there and the robots were never produced.
{kind=link}
MiniRobot
This MiniRobot, unfortunately, never saw the light of day. These were supposed to be super small, cost effective "battle bots" made to be disabled with specifics hits. Altough the idea of having robot battles in class is cool, the education value just wasn't there and the robots were never produced.
{kind=link}
MiniRobot
This MiniRobot, unfortunately, never saw the light of day. These were supposed to be super small, cost effective "battle bots" made to be disabled with specifics hits. Altough the idea of having robot battles in class is cool, the education value just wasn't there and the robots were never produced.
{kind=link}
MiniRobot
This MiniRobot, unfortunately, never saw the light of day. These were supposed to be super small, cost effective "battle bots" made to be disabled with specifics hits. Altough the idea of having robot battles in class is cool, the education value just wasn't there and the robots were never produced.
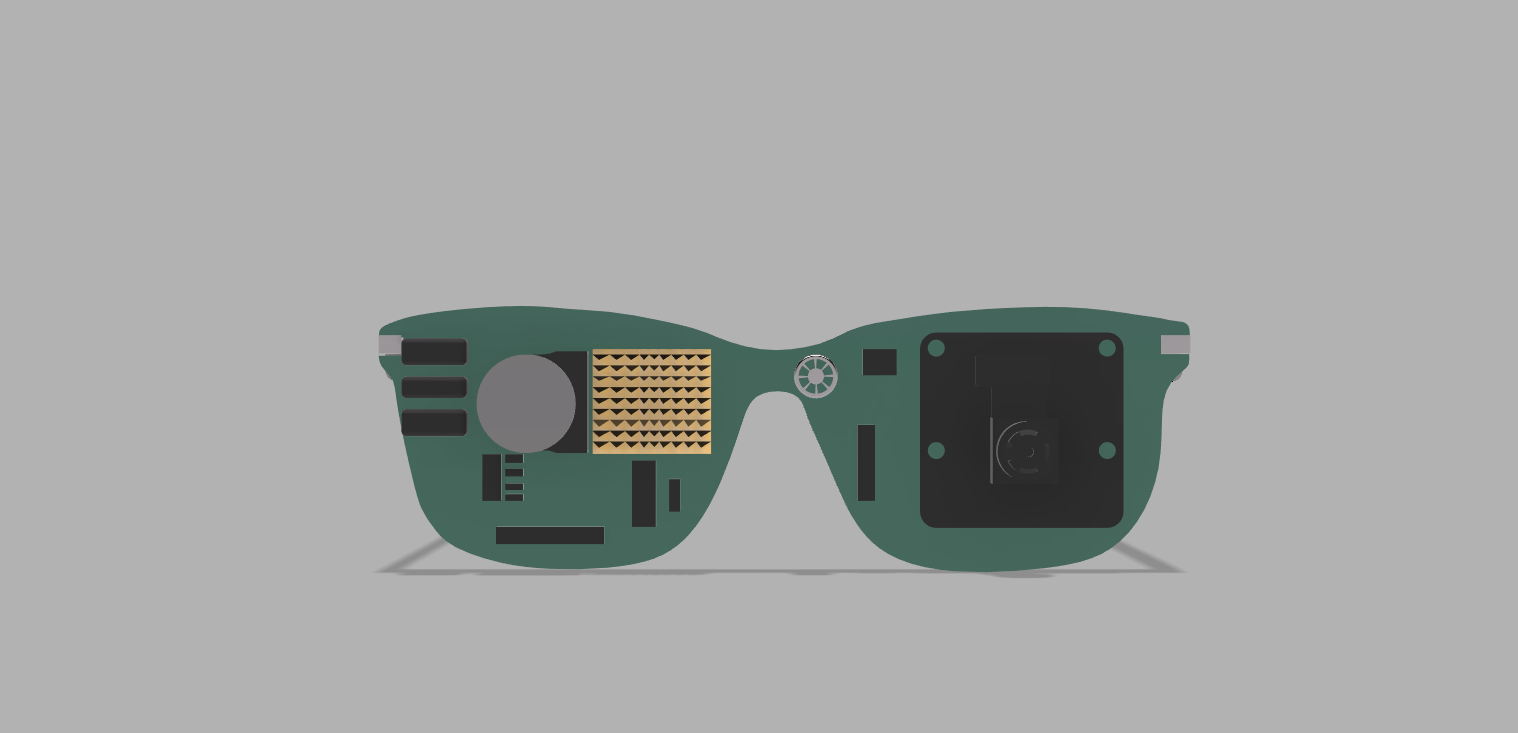
AR Glasses
Those AR Glasses were designed for a competition for inventions that could change the world. My vision for this project was to make an AI driven pair of glasses that could identidy items, obstacles, dangers and more and relay that information to the person wearing it using a bone conduction module in the temple tip of the glasses. The glasses were designed for fully blind people to help them understand their surroundings. The lack of lenses on the glasses made it possible for us to fit every parts necessary on a single board while using known parts like the Arm cortex A53 processor and a 720p 2mp camera. I, unfortunately, lost the competition and thus didn't get the 5000$ reward I was counting on to developp the glasses.
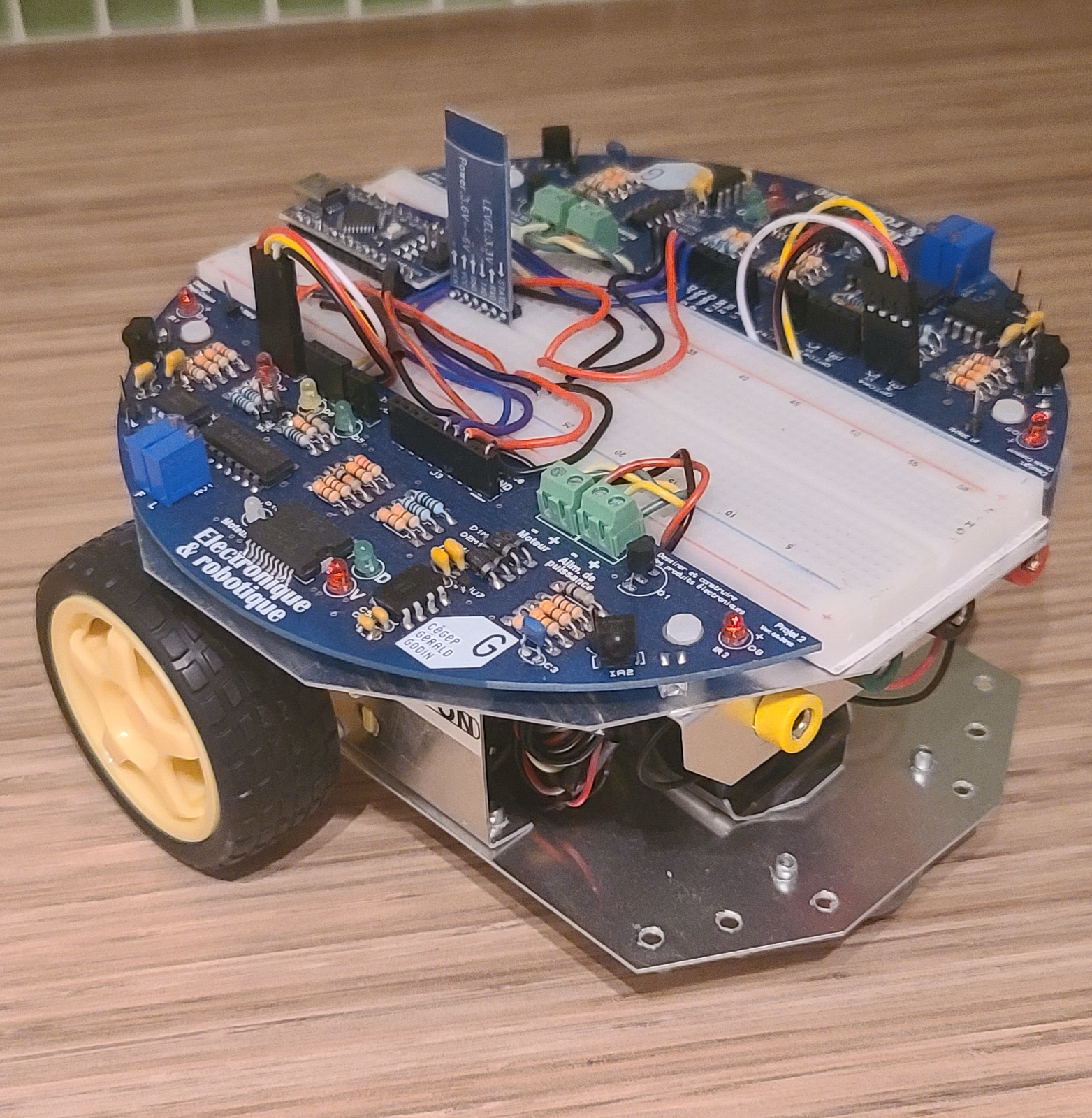
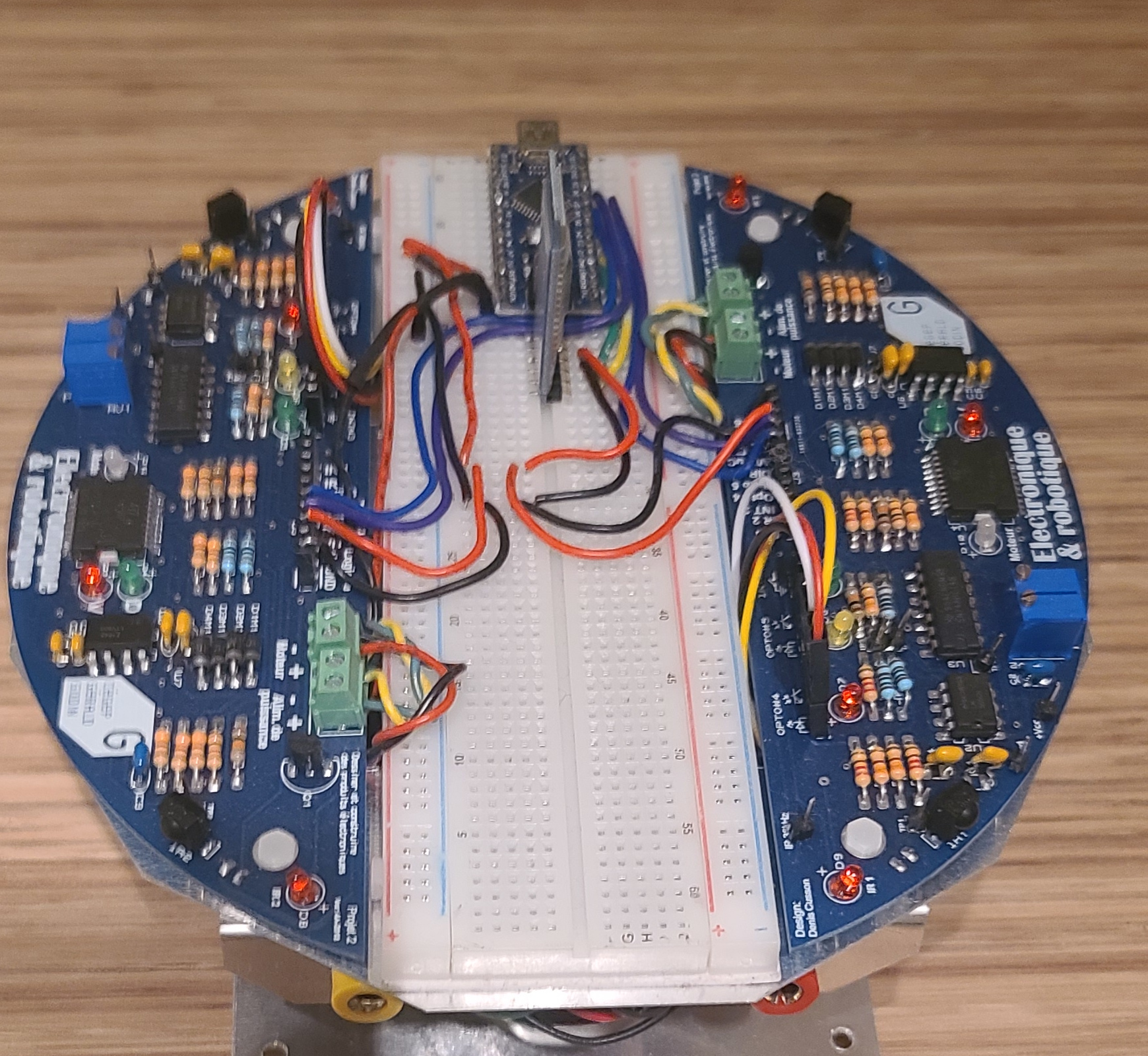
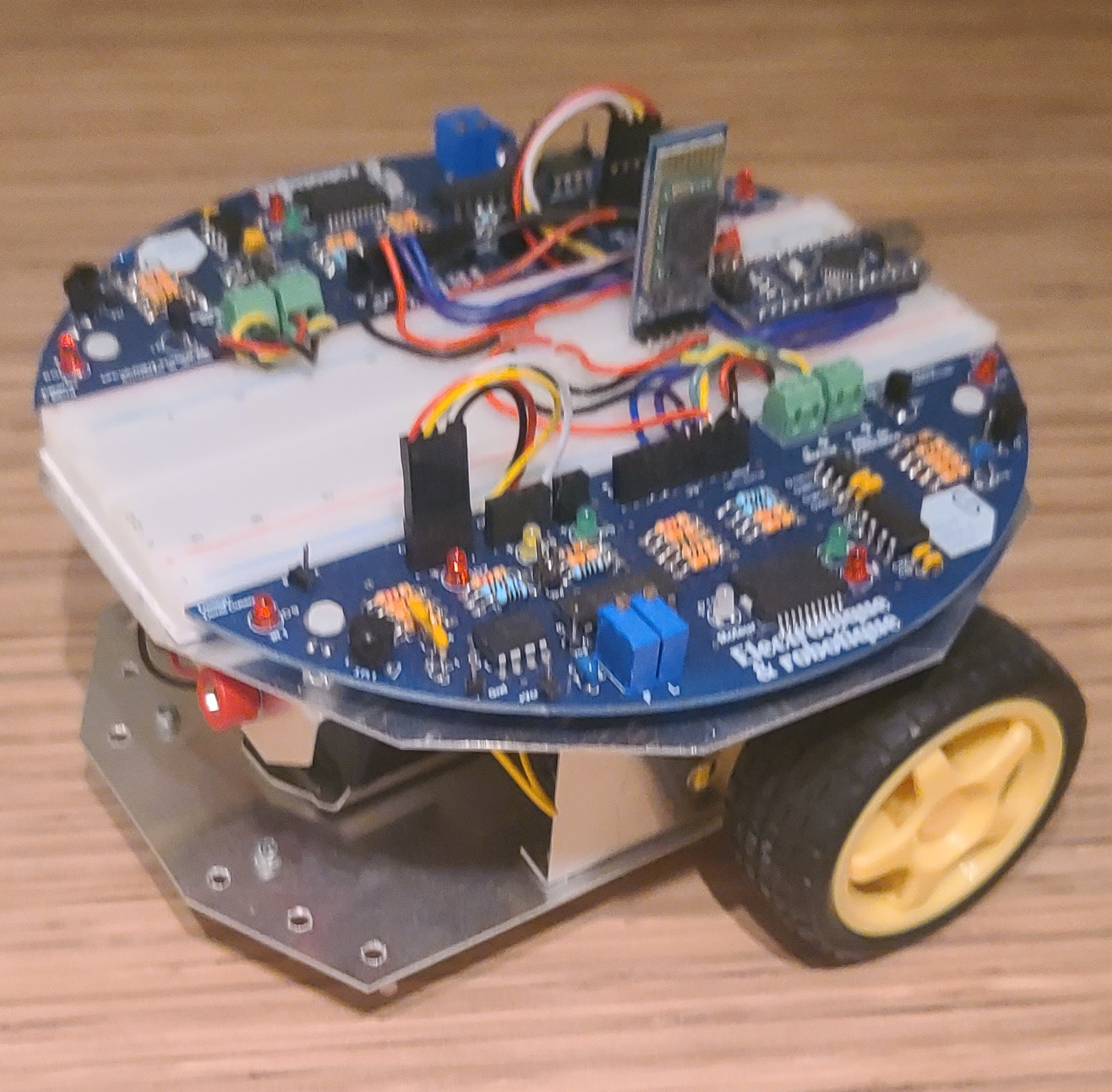
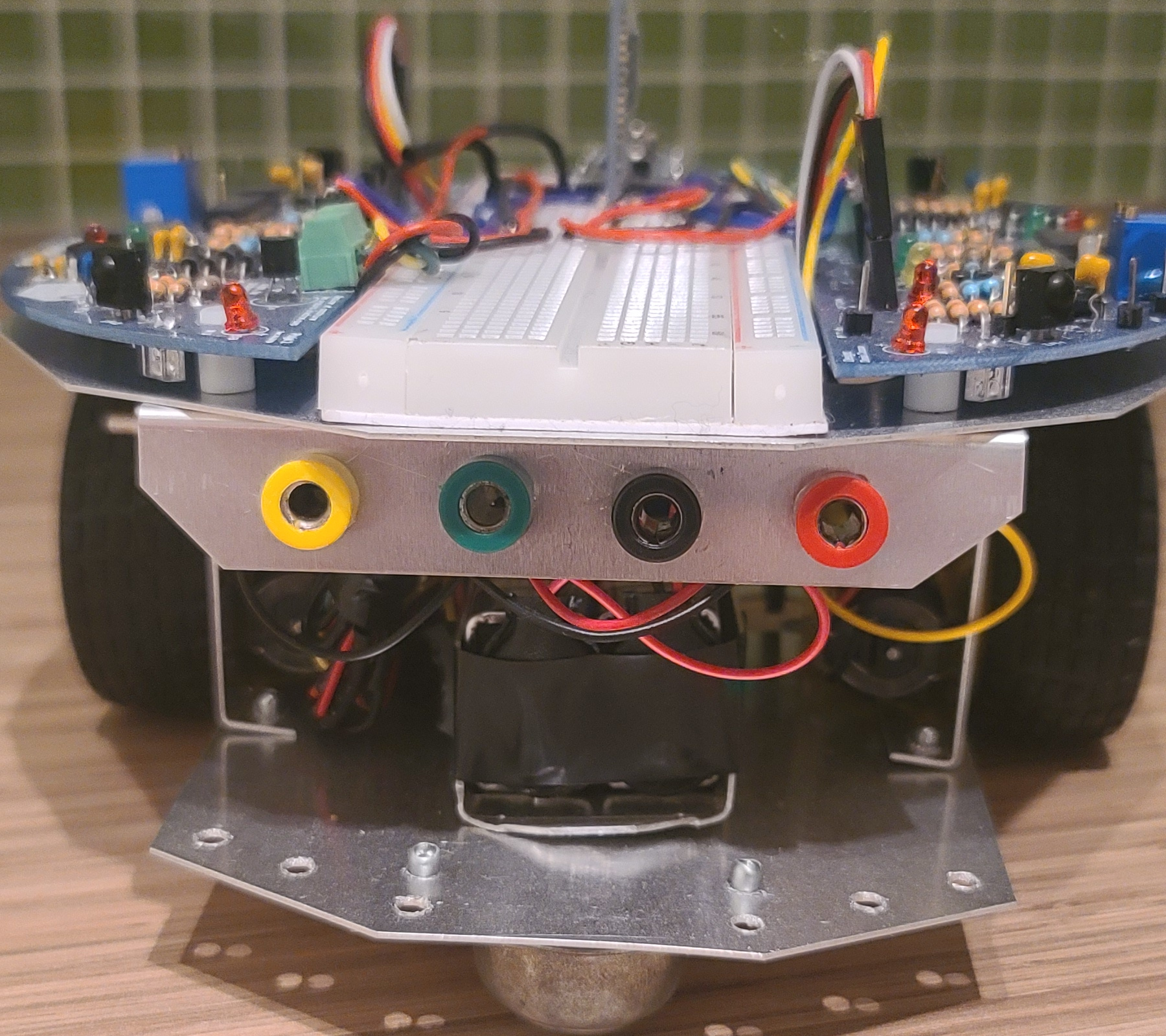
Mini Robot
This small robot was part of the curriculum to teach us about planning and designing electronic schematics. It also tought us how to design PCBs and have them manufactured online. The PCB you see in the picture is the one I designed and had manufactured by JLCPCB.
{kind=link}
Mini Robot
This small robot was part of the curriculum to teach us about planning and designing electronic schematics. It also tought us how to design PCBs and have them manufactured online. The PCB you see in the picture is the one I designed and had manufactured by JLCPCB.
{kind=link}
{kind=link}

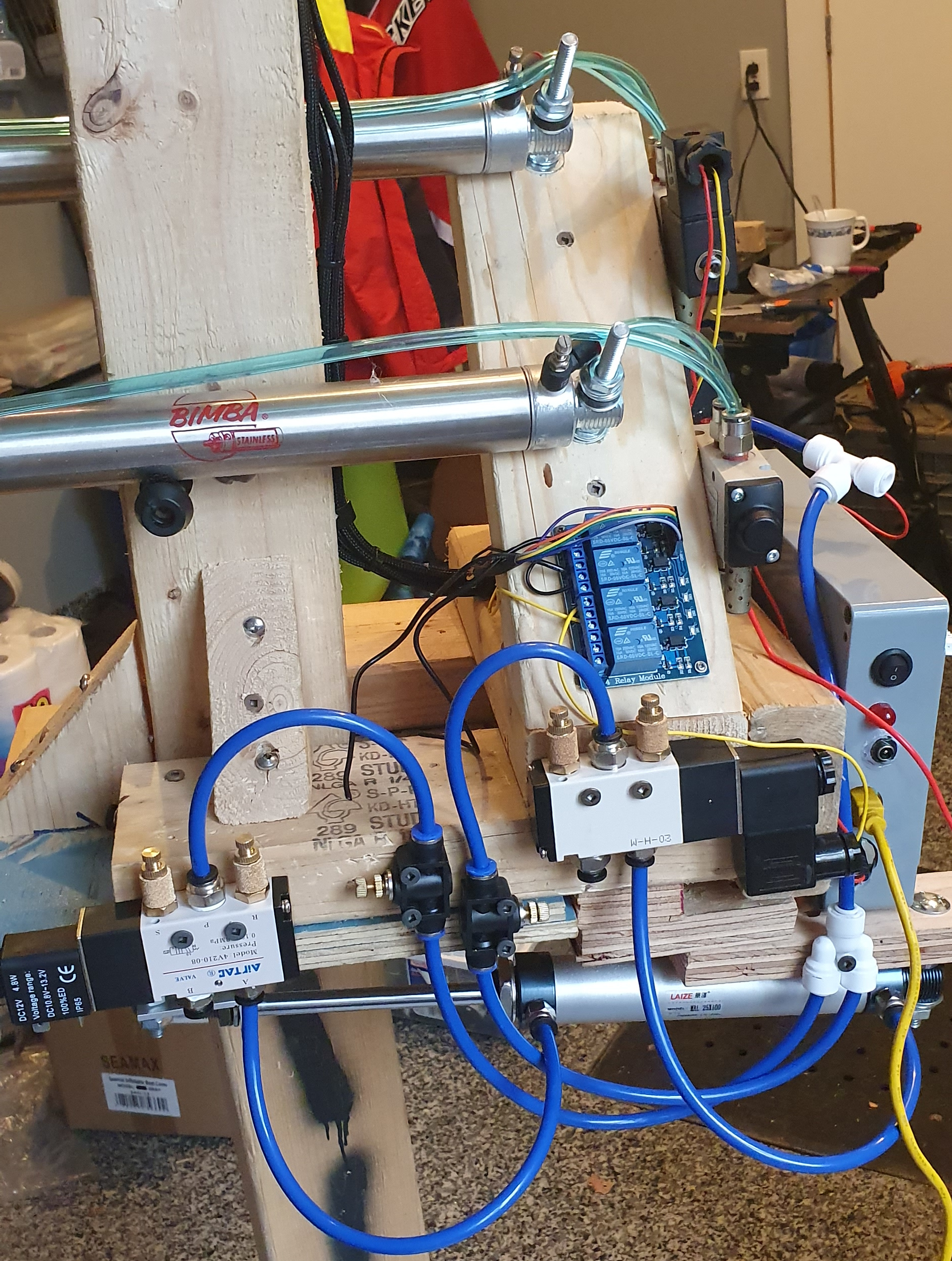
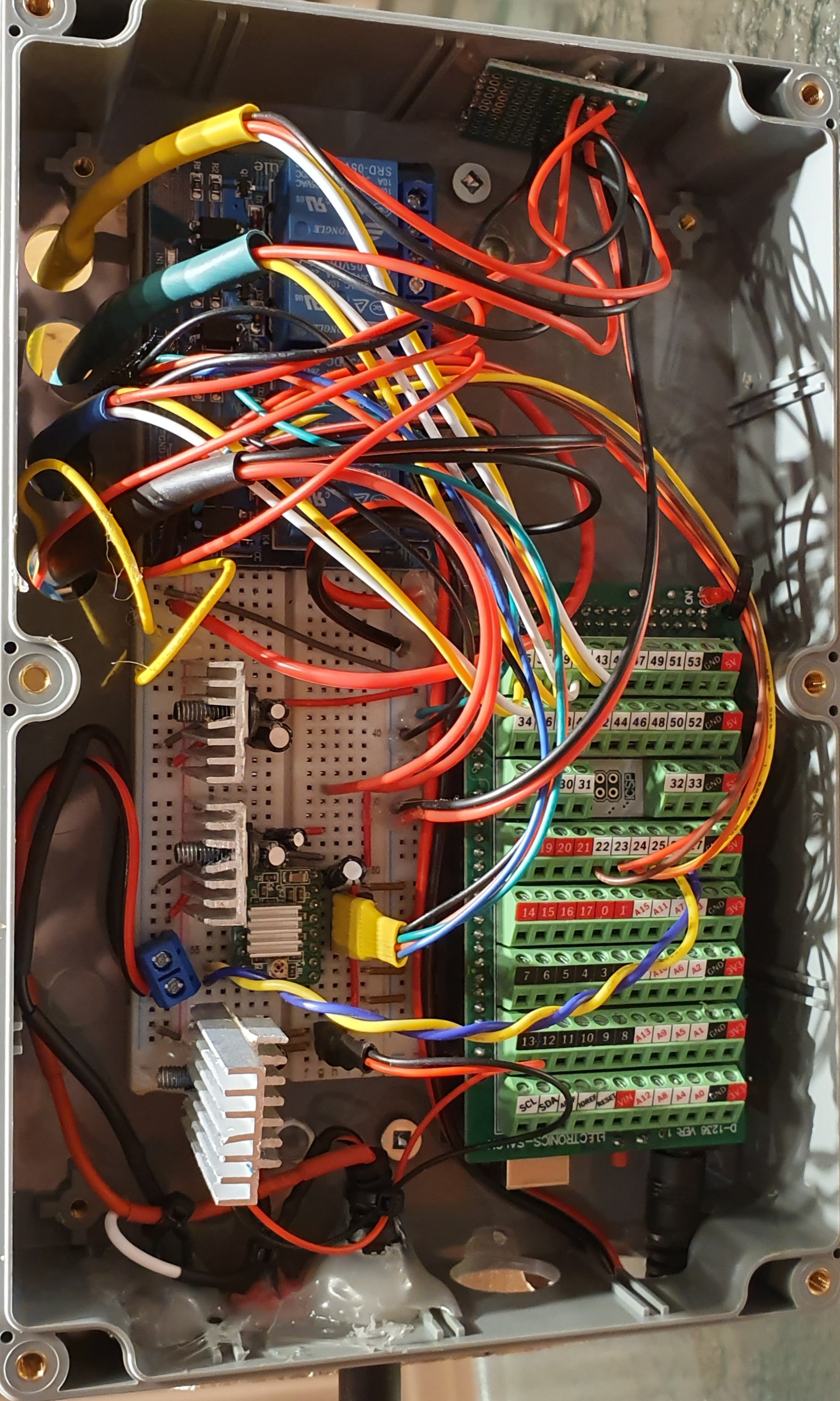
Halloween Robot
This robot was made for a halloween haunted house in 2019. It used 3 air cylinders, 4 solonoid valves, an arduino Mega and 3 ultrasonic sensors (HC-SR04). The ultrasonic sensors were used to track everyone while they came around the corner and the air cylinders were used to rotate and activate the scythe. Click here for a video of the robot in action.
{kind=link}
Halloween Robot
This robot was made for a halloween haunted house in 2019. It used 3 air cylinders, 4 solonoid valves, an arduino Mega and 3 ultrasonic sensors (HC-SR04). The ultrasonic sensors were used to track everyone while they came around the corner and the air cylinders were used to rotate and activate the scythe. Click here for a video of the robot in action.
{kind=link}
Halloween Robot
This robot was made for a halloween haunted house in 2019. It used 3 air cylinders, 4 solonoid valves, an arduino Mega and 3 ultrasonic sensors (HC-SR04). The ultrasonic sensors were used to track everyone while they came around the corner and the air cylinders were used to rotate and activate the scythe. Click here for a video of the robot in action.
{kind=link}
Halloween Robot
This robot was made for a halloween haunted house in 2019. It used 3 air cylinders, 4 solonoid valves, an arduino Mega and 3 ultrasonic sensors (HC-SR04). The ultrasonic sensors were used to track everyone while they came around the corner and the air cylinders were used to rotate and activate the scythe. Click here for a video of the robot in action.
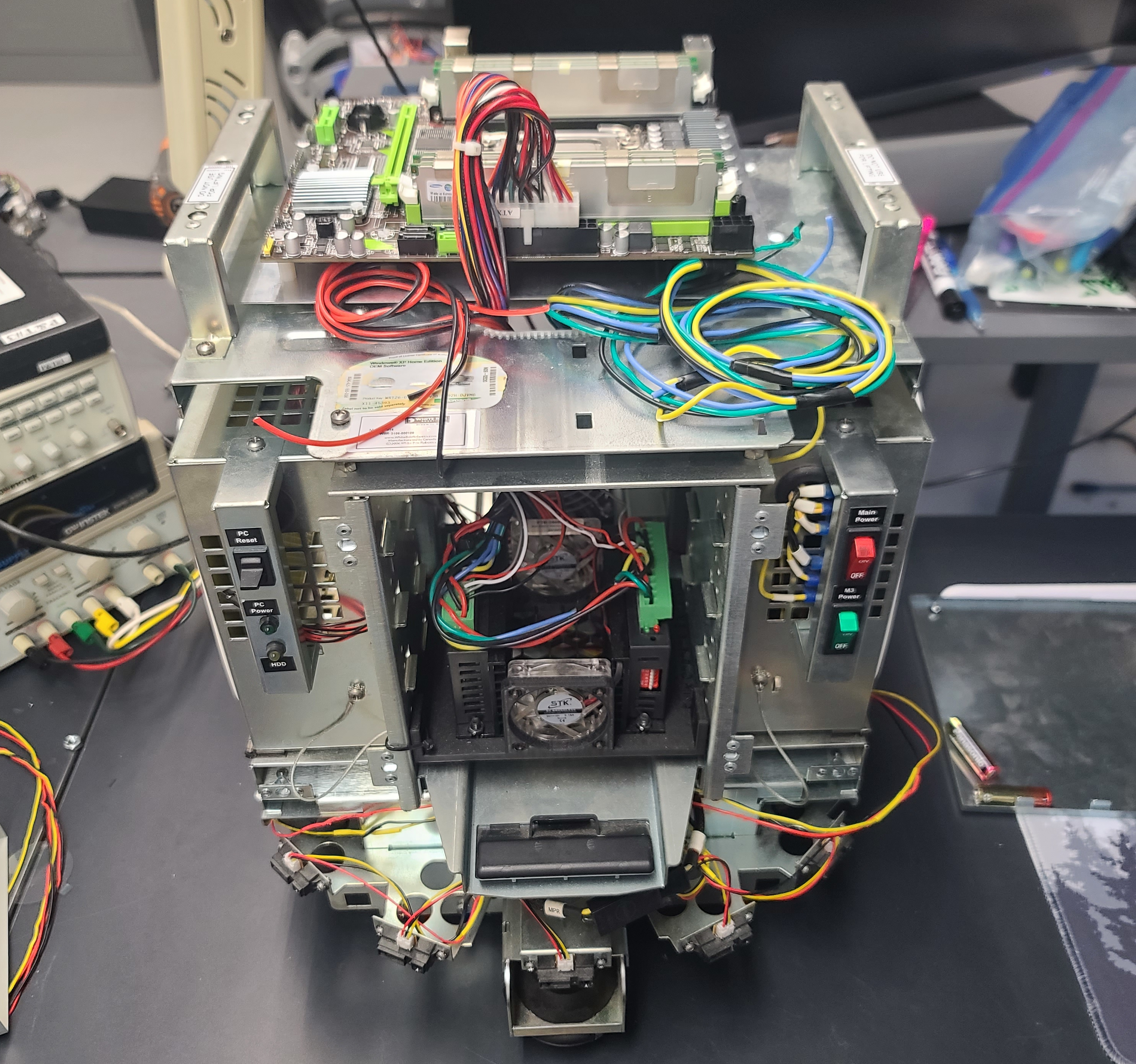
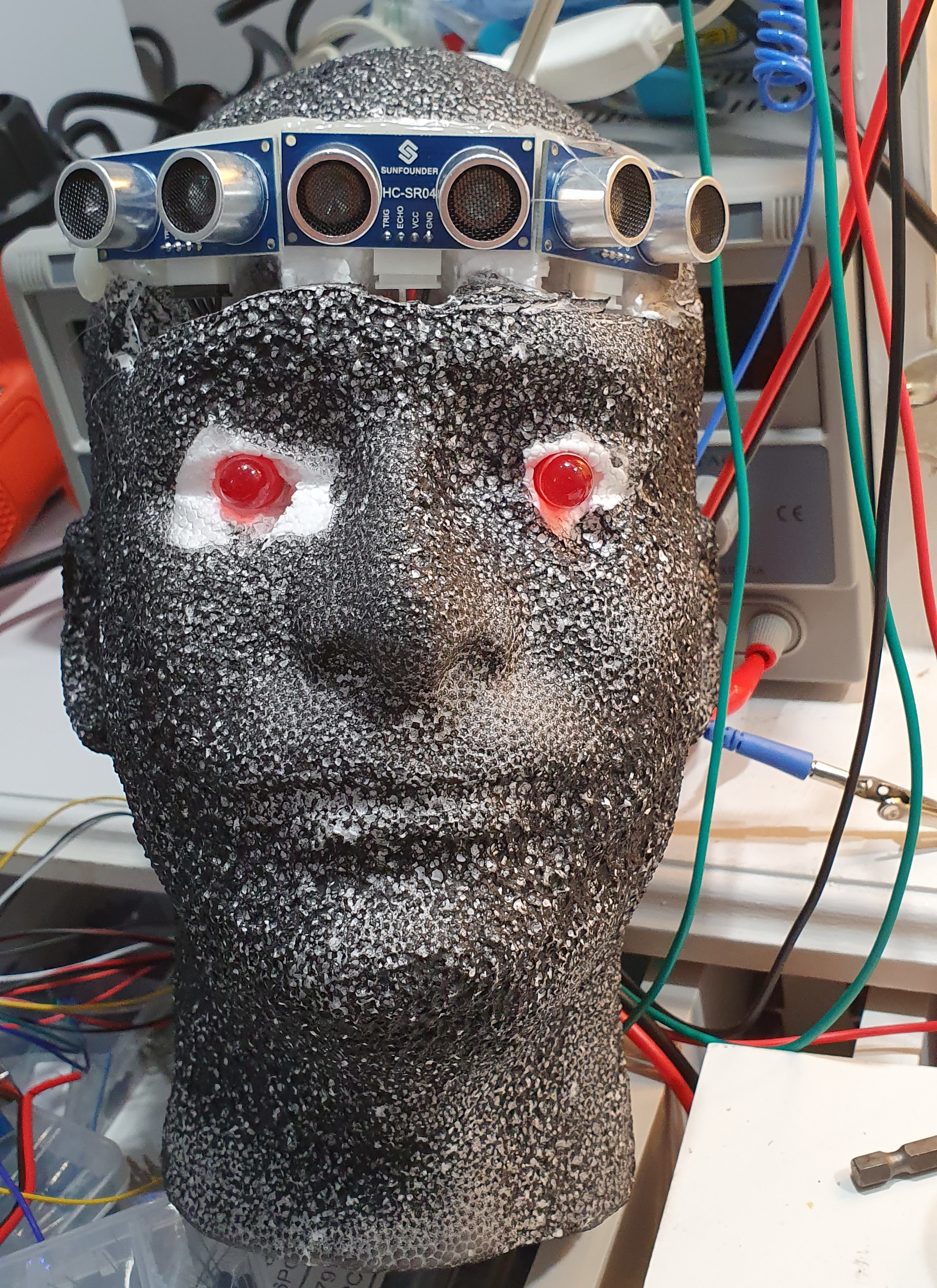
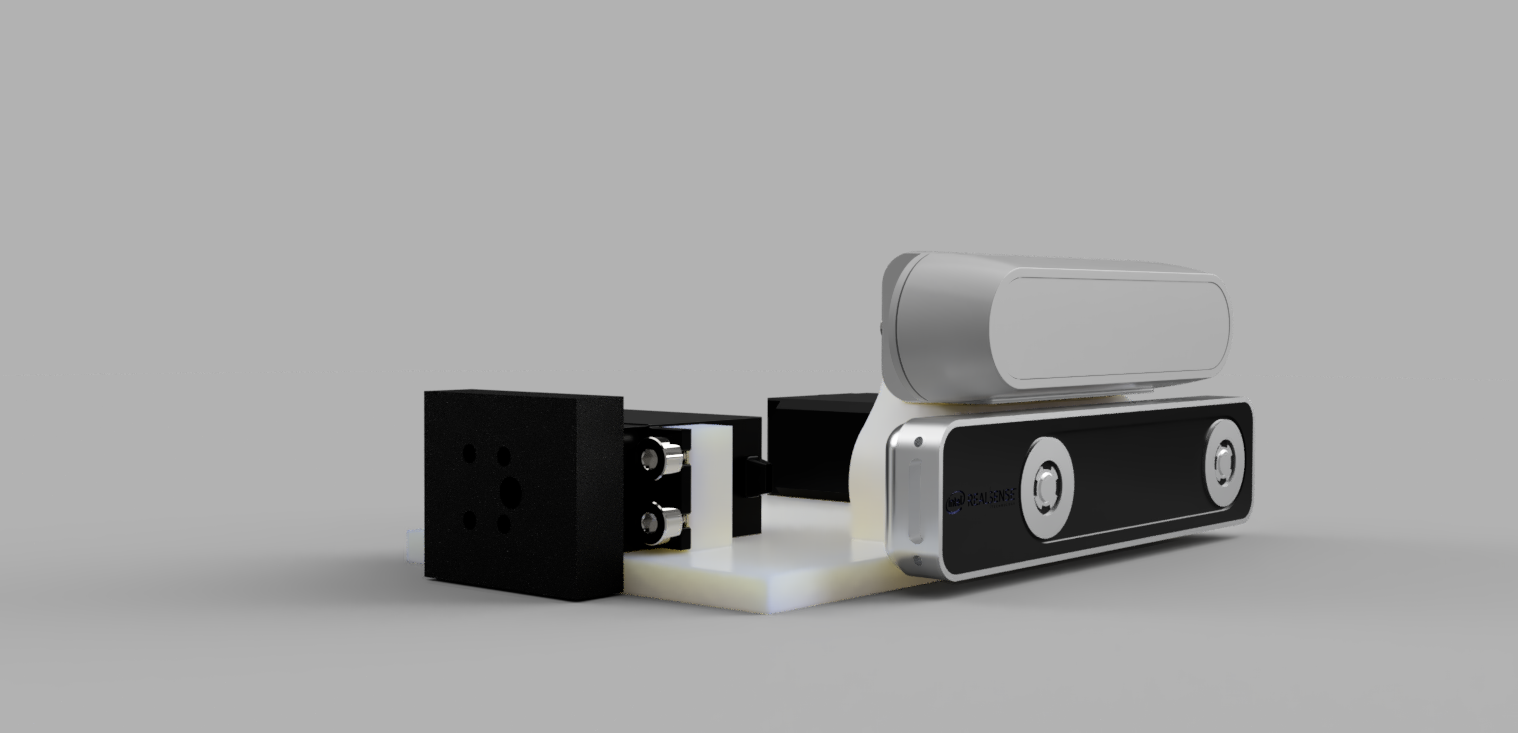
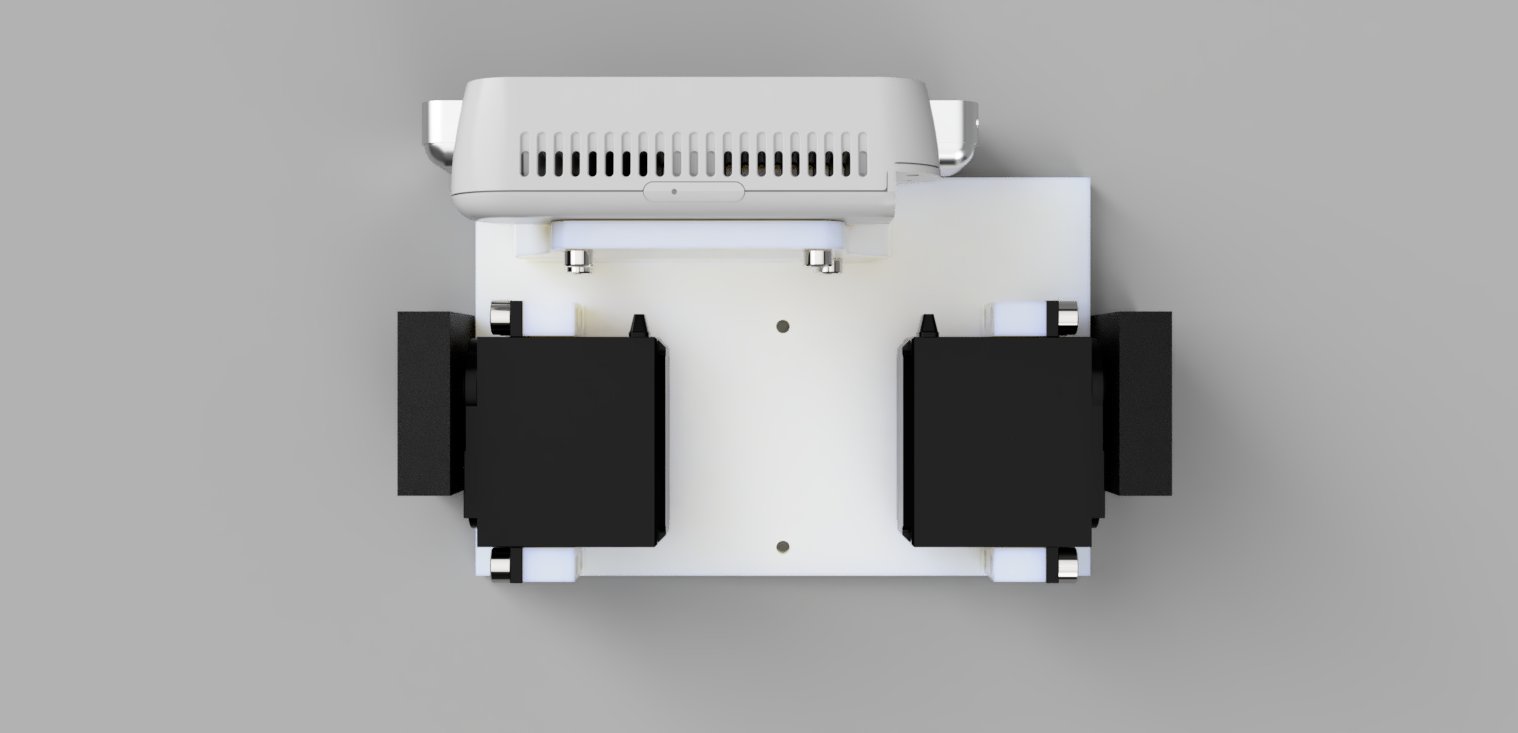
Autonomous Robot
This is my current project. I am bringing back to life this very old PC-BOT 914 by White Box Robotics. Over the past few months, I've been removing unnecessary components to make space for new and better parts. The robot will be powered by a Nvidia Jetson Nano 4Gb. It will also use a laser scanner and a few Intel RealSense cameras (D435I and T265)to map it's environement and detect obstacles and objects. Using ROS, the robot will be able to autonomously navigate and will be able to freely roam around with the help of a script that will randomly generate a new navigation goal after every successful goal execution.
{kind=link}
Autonomous Robot
This is my current project. I am bringing back to life this very old PC-BOT 914 by White Box Robotics. Over the past few months, I've been removing unnecessary components to make space for new and better parts. The robot will be powered by a Nvidia Jetson Nano 4Gb. It will also use a laser scanner and a few Intel RealSense cameras (D435I and T265)to map it's environement and detect obstacles and objects. Using ROS, the robot will be able to autonomously navigate and will be able to freely roam around with the help of a script that will randomly generate a new navigation goal after every successful goal execution.
{kind=link}
Autonomous Robot
This is my current project. I am bringing back to life this very old PC-BOT 914 by White Box Robotics. Over the past few months, I've been removing unnecessary components to make space for new and better parts. The robot will be powered by a Nvidia Jetson
Nano 4Gb. It will also use a laser scanner and a few Intel RealSense cameras (D435I and T265)to map it's environement and detect obstacles and objects. Using ROS, the robot will be able to autonomously navigate and will
be able to freely roam around with the help of a script that will randomly generate a new navigation goal after every successful goal execution.
Video
{kind=link}
Autonomous Robot
This is my current project. I am bringing back to life this very old PC-BOT 914 by White Box Robotics. Over the past few months, I've been removing unnecessary components to make space for new and better parts. The robot will be powered by a Nvidia Jetson
Nano 4Gb. It will also use a laser scanner and a few Intel RealSense cameras (D435I and T265)to map it's environement and detect obstacles and objects. Using ROS, the robot will be able to autonomously navigate and will
be able to freely roam around with the help of a script that will randomly generate a new navigation goal after every successful goal execution.
Video
{kind=link}
Autonomous Robot
This is my current project. I am bringing back to life this very old PC-BOT 914 by White Box Robotics. Over the past few months, I've been removing unnecessary components to make space for new and better parts. The robot will be powered by a Nvidia Jetson
Nano 4Gb. It will also use a laser scanner and a few Intel RealSense cameras (D435I and T265)to map it's environement and detect obstacles and objects. Using ROS, the robot will be able to autonomously navigate and will
be able to freely roam around with the help of a script that will randomly generate a new navigation goal after every successful goal execution.
Video
{kind=link}
Autonomous Robot
This is my current project. I am bringing back to life this very old PC-BOT 914 by White Box Robotics. Over the past few months, I've been removing unnecessary components to make space for new and better parts. The robot will be powered by a Nvidia Jetson
Nano 4Gb. It will also use a laser scanner and a few Intel RealSense cameras (D435I and T265)to map it's environement and detect obstacles and objects. Using ROS, the robot will be able to autonomously navigate and will
be able to freely roam around with the help of a script that will randomly generate a new navigation goal after every successful goal execution.
Video
{kind=link}
Autonomous Robot
This is my current project. I am bringing back to life this very old PC-BOT 914 by White Box Robotics. Over the past few months, I've been removing unnecessary components to make space for new and better parts. The robot will be powered by a Nvidia Jetson
Nano 4Gb. It will also use a laser scanner and a few Intel RealSense cameras (D435I and T265)to map it's environement and detect obstacles and objects. Using ROS, the robot will be able to autonomously navigate and will
be able to freely roam around with the help of a script that will randomly generate a new navigation goal after every successful goal execution.
Video
{kind=link}
Autonomous Robot
This is my current project. I am bringing back to life this very old PC-BOT 914 by White Box Robotics. Over the past few months, I've been removing unnecessary components to make space for new and better parts. The robot will be powered by a Nvidia Jetson Nano 4Gb. It will also use a laser scanner and a few Intel RealSense cameras (D435I and T265)to map it's environement and detect obstacles and objects. Using ROS, the robot will be able to autonomously navigate and will be able to freely roam around with the help of a script that will randomly generate a new navigation goal after every successful goal execution.
{kind=link}
Autonomous Robot
This is my current project. I am bringing back to life this very old PC-BOT 914 by White Box Robotics. Over the past few months, I've been removing unnecessary components to make space for new and better parts. The robot will be powered by a Nvidia Jetson Nano 4Gb. It will also use a laser scanner and a few Intel RealSense cameras (D435I and T265)to map it's environement and detect obstacles and objects. Using ROS, the robot will be able to autonomously navigate and will be able to freely roam around with the help of a script that will randomly generate a new navigation goal after every successful goal execution.
{kind=link}
Autonomous Robot
This is my current project. I am bringing back to life this very old PC-BOT 914 by White Box Robotics. Over the past few months, I've been removing unnecessary components to make space for new and better parts. The robot will be powered by a Nvidia Jetson Nano 4Gb. It will also use a laser scanner and a few Intel RealSense cameras (D435I and T265)to map it's environement and detect obstacles and objects. Using ROS, the robot will be able to autonomously navigate and will be able to freely roam around with the help of a script that will randomly generate a new navigation goal after every successful goal execution.
{kind=link}
Autonomous Robot
This is my current project. I am bringing back to life this very old PC-BOT 914 by White Box Robotics. Over the past few months, I've been removing unnecessary components to make space for new and better parts. The robot will be powered by a Nvidia Jetson Nano 4Gb. It will also use a laser scanner and a few Intel RealSense cameras (D435I and T265)to map it's environement and detect obstacles and objects. Using ROS, the robot will be able to autonomously navigate and will be able to freely roam around with the help of a script that will randomly generate a new navigation goal after every successful goal execution.
{kind=link}
Autonomous Robot
This is my current project. I am bringing back to life this very old PC-BOT 914 by White Box Robotics. Over the past few months, I've been removing unnecessary components to make space for new and better parts. The robot will be powered by a Nvidia Jetson Nano 4Gb. It will also use a laser scanner and a few Intel RealSense cameras (D435I and T265)to map it's environement and detect obstacles and objects. Using ROS, the robot will be able to autonomously navigate and will be able to freely roam around with the help of a script that will randomly generate a new navigation goal after every successful goal execution.
Dynamixel Robot
This small robot is the successor to the tracked robot that was shown before!
It is extremely fast and easy to print (only 6 hours). It is a very simple design but is super strong and compact. It uses 2 Dynamixel
AX-12 Serial servo motors, a raspberry pi 3b, a 10.4Ah battery, a transformer, a tristate buffer, a few extra components and a 5-line sensor. My personnal unit also had a small nextion HMI TFT touch display used to demo
pre-programmed actions to students. I made a complete API to make it easier for students to use the AX-12 motors since they are somewhat hard to use and very easy to burn.
The API can be found here: https://github.com/filoucool/Labos_Python_Rachid/blob/main/Version%20Robot%20F%C3%A9lix/Ax12.py
{kind=link}
Dynamixel Robot
This small robot is the successor to the tracked robot that was shown before!
It is extremely fast and easy to print (only 6 hours). It is a very simple design but is super strong and compact. It uses 2 Dynamixel
AX-12 Serial servo motors, a raspberry pi 3b, a 10.4Ah battery, a transformer, a tristate buffer, a few extra components and a 5-line sensor. My personnal unit also had a small nextion HMI TFT touch display used to demo
pre-programmed actions to students. I made a complete API to make it easier for students to use the AX-12 motors since they are somewhat hard to use and very easy to burn.
The API can be found here: https://github.com/filoucool/Labos_Python_Rachid/blob/main/Version%20Robot%20F%C3%A9lix/Ax12.py
{kind=link}
Dynamixel Robot
This small robot is the successor to the tracked robot that was shown before!
It is extremely fast and easy to print (only 6 hours). It is a very simple design but is super strong and compact. It uses 2 Dynamixel
AX-12 Serial servo motors, a raspberry pi 3b, a 10.4Ah battery, a transformer, a tristate buffer, a few extra components and a 5-line sensor. My personnal unit also had a small nextion HMI TFT touch display used to demo
pre-programmed actions to students. I made a complete API to make it easier for students to use the AX-12 motors since they are somewhat hard to use and very easy to burn.
The API can be found here: https://github.com/filoucool/Labos_Python_Rachid/blob/main/Version%20Robot%20F%C3%A9lix/Ax12.py

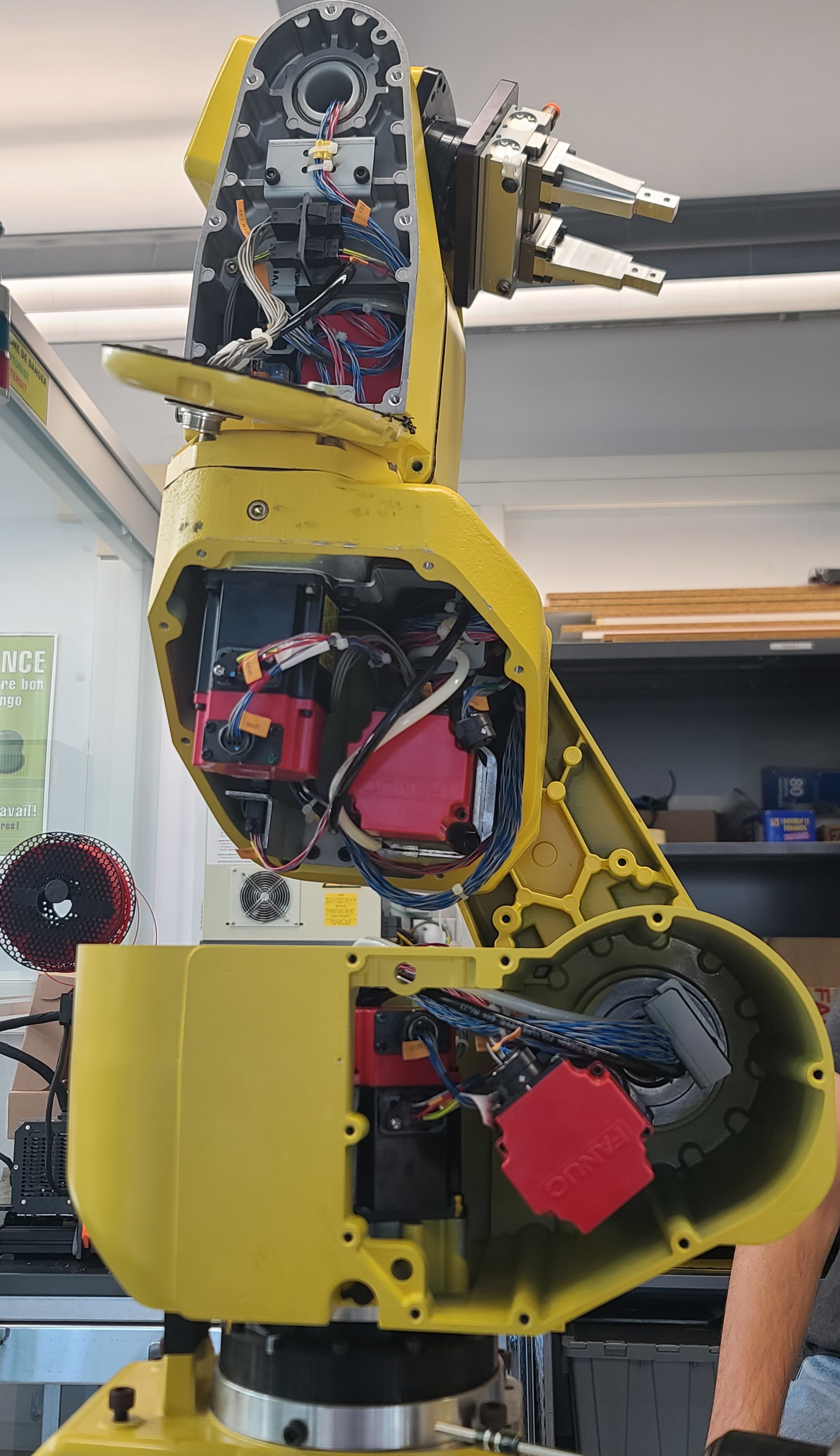
Fanuc RobotArm Rebuild
In the summer of 2021, I was challenged by my teachers to repair this Fanuc LR Mate 200iB robot arm. Over the course of 4 months, I worked on testing and disassembling the robot arm and ended up finding out that two motors were completely ceased and unrepairable and we had a few more broken components. The project was eventually abandonned because we were not able to find replacement parts for a reasonable price.
{kind=link}
Fanuc RobotArm Rebuild
In the summer of 2021, I was challenged by my teachers to repair this Fanuc LR Mate 200iB robot arm. Over the course of 4 months, I worked on testing and disassembling the robot arm and ended up finding out that two motors were completely ceased and unrepairable and we had a few more broken components. The project was eventually abandonned because we were not able to find replacement parts for a reasonable price.